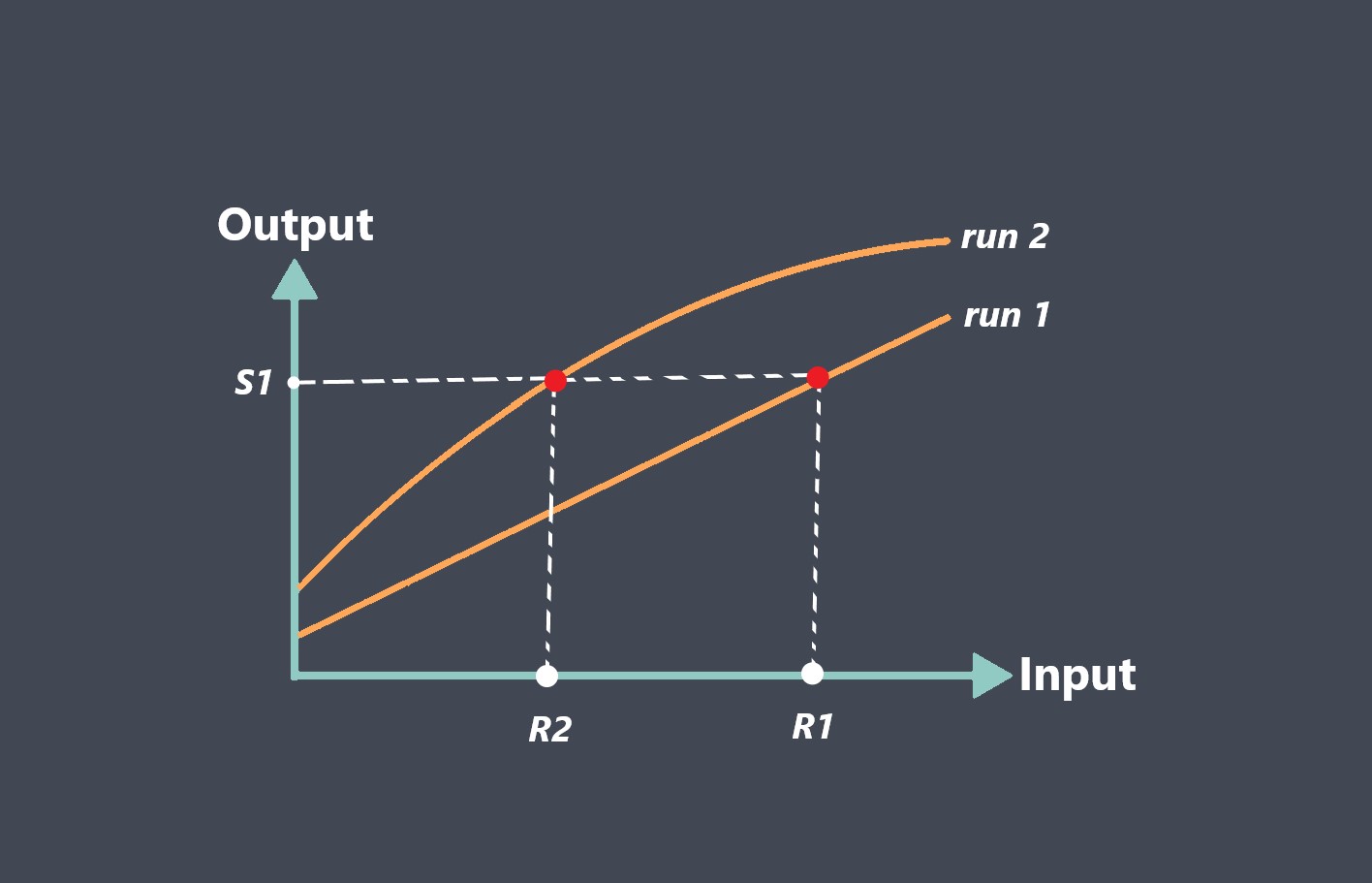
This is the difference in sensor output for the same input signal, depending on whether the input signal is increasing or decreasing.
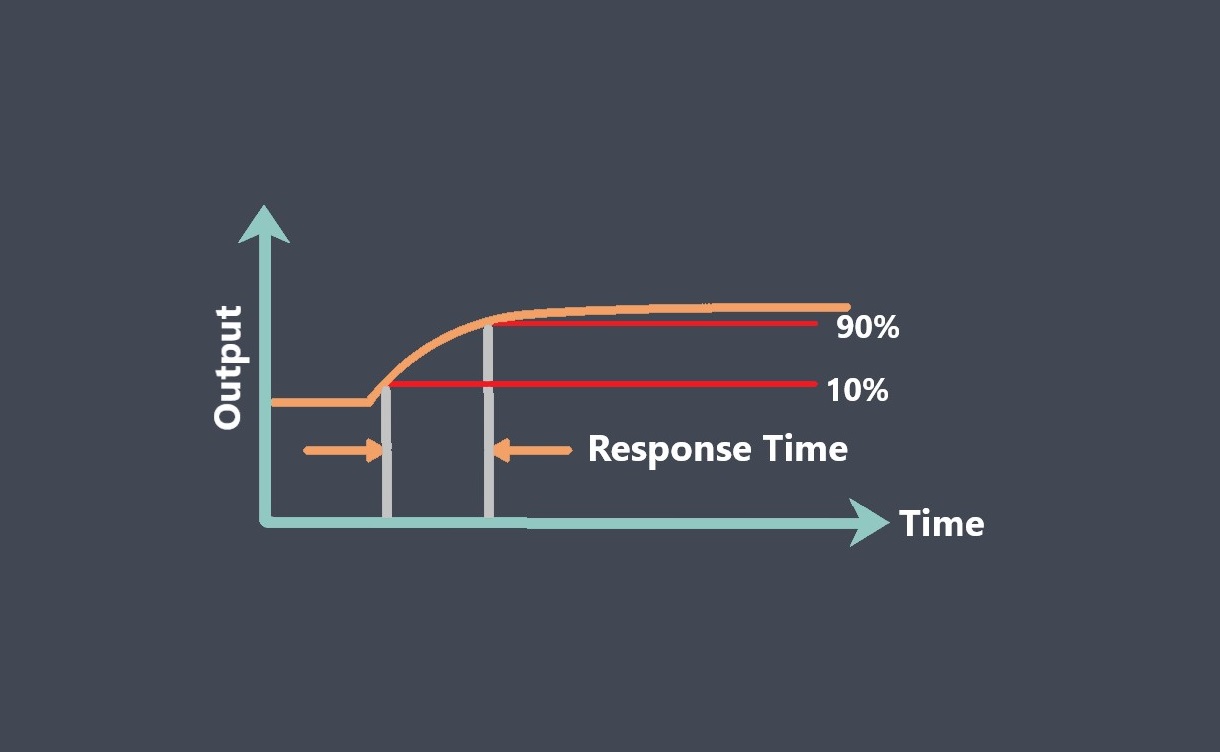
Hysteresis is a characteristic of some sensors that causes the output signal to lag behind the input signal, especially when the input signal is changing rapidly. This lag occurs because of internal delays or memory effects within the sensor. Hysteresis can result in inaccurate measurements and is often a problem in sensors that are used to measure rapidly changing inputs, such as in control systems.
Sensor hysteresis refers to a phenomenon exhibited by certain types of sensors where there is a time delay or lag in their response when the input signal changes. Hysteresis can be observed in various types of sensors, including temperature sensors, pressure sensors, and position sensors.
When a sensor exhibits hysteresis, its output does not immediately change in proportion to the input signal when the signal increases or decreases. Instead, there is a noticeable delay or difference in the sensor’s output during upward and downward transitions of the input signal.
Factors that affect the sensor hysteresis
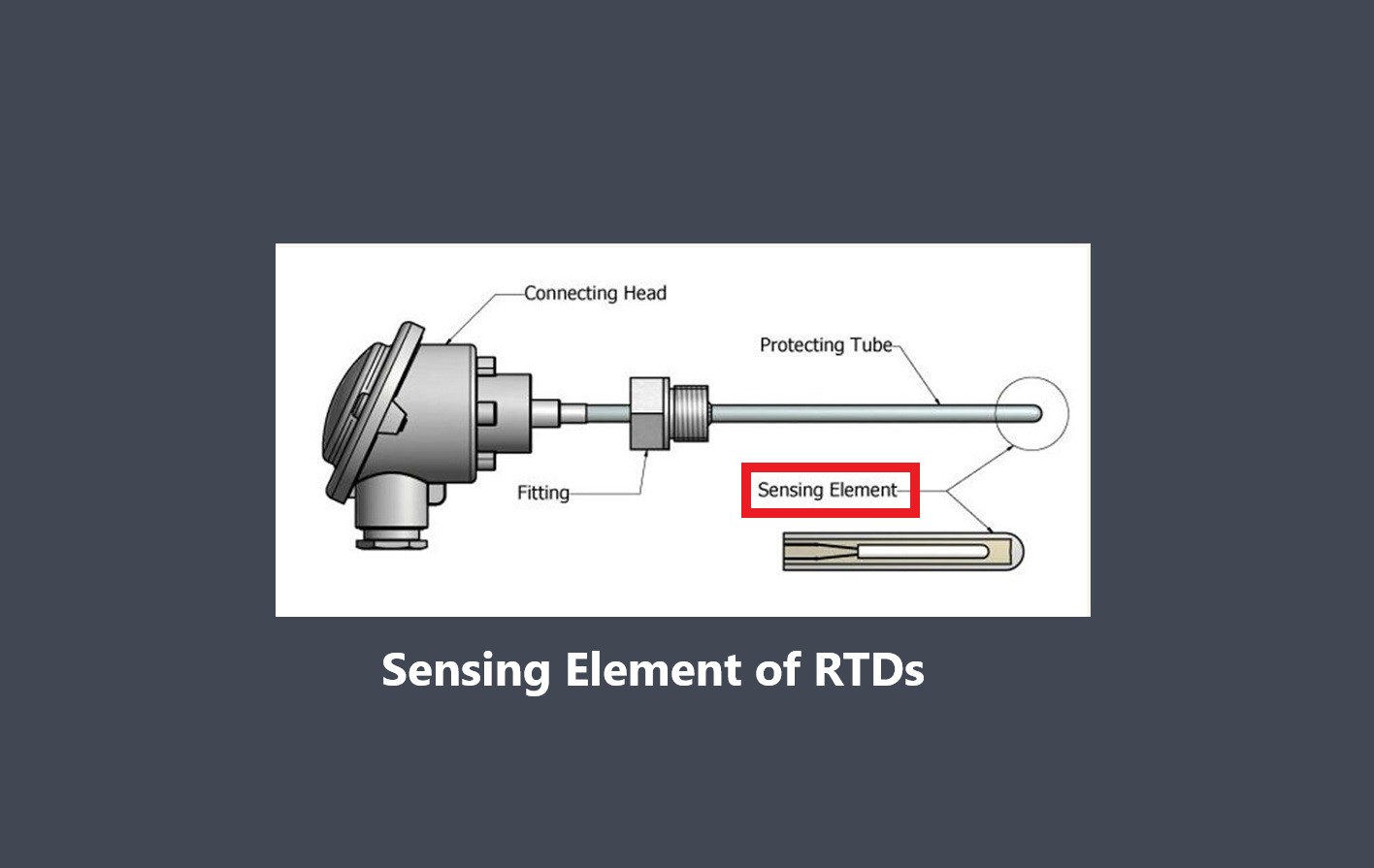
The hysteresis of a sensor refers to its tendency to exhibit different output values for the same input, depending on whether the input is increasing or decreasing. Hysteresis is often caused by mechanical or electrical properties of the sensor that do not respond identically in both directions of the input signal. For example, a temperature sensor that relies on a thermocouple may exhibit hysteresis due to the thermal conductivity of the junction materials, which can cause a delay in response time and a difference in output signal for increasing and decreasing temperature. Several factors can influence the hysteresis of a sensor. Here are some key factors:
Mechanical Design
The design and construction of the sensor can significantly impact its hysteresis. Factors like the quality of materials, manufacturing tolerances, and mechanical stability can all affect hysteresis.
Friction and Wear
If the sensor involves moving parts or relies on sliding contacts, friction and wear can introduce hysteresis. Over time, mechanical components may experience degradation, leading to increased hysteresis.
Magnetic Hysteresis (magnetic sensors)
Magnetic sensors, such as Hall effect sensors, may exhibit hysteresis due to the residual magnetism present in the sensing material. This residual magnetism can cause variations in output as the magnetic field strength changes.
Electrical Characteristics
In electrical sensors, factors like resistance, capacitance, and inductance can contribute to hysteresis. Capacitance and inductance, for example, can introduce delays and phase shifts that affect the sensor’s response.
Environmental Conditions
Variations in temperature, humidity, pressure, or other environmental factors can impact the hysteresis of a sensor. Thermal expansion, moisture absorption, or changes in contact resistance due to contamination can all contribute to hysteresis.
Signal Conditioning
The electronic circuitry used to condition and process the sensor’s output can influence hysteresis. Improper amplification, filtering, or nonlinearities in the signal conditioning circuitry can introduce additional hysteresis.
It’s important to note that different types of sensors may have specific factors that more prominently affect their hysteresis. Therefore, understanding the specific sensor technology and its operating principles is essential for a comprehensive analysis of hysteresis factors.
what's the difference between Drift and Hysteresis of a sensor?
Drift and hysteresis are both phenomena that can affect the performance of sensors, but they are distinct in their nature and impact.
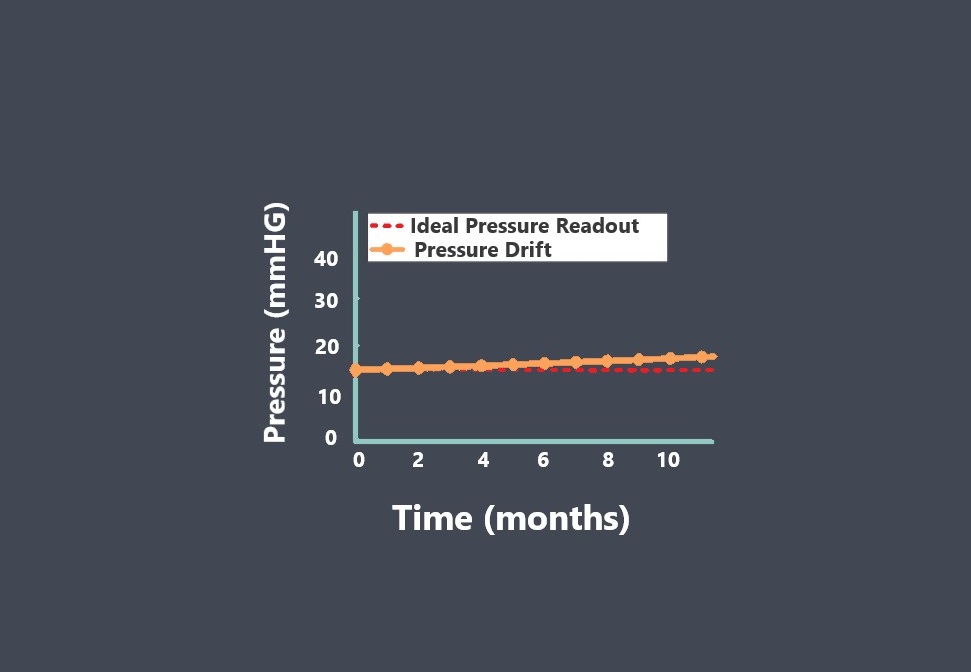
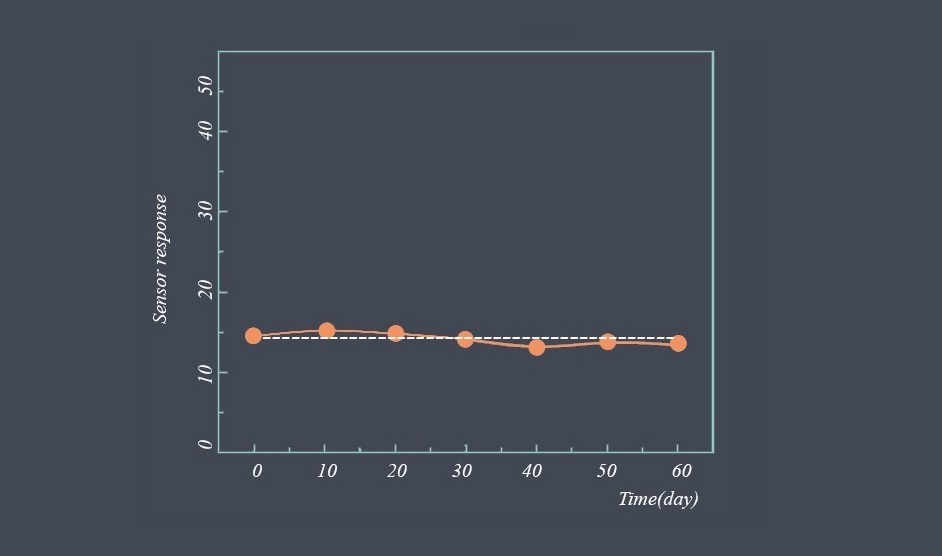
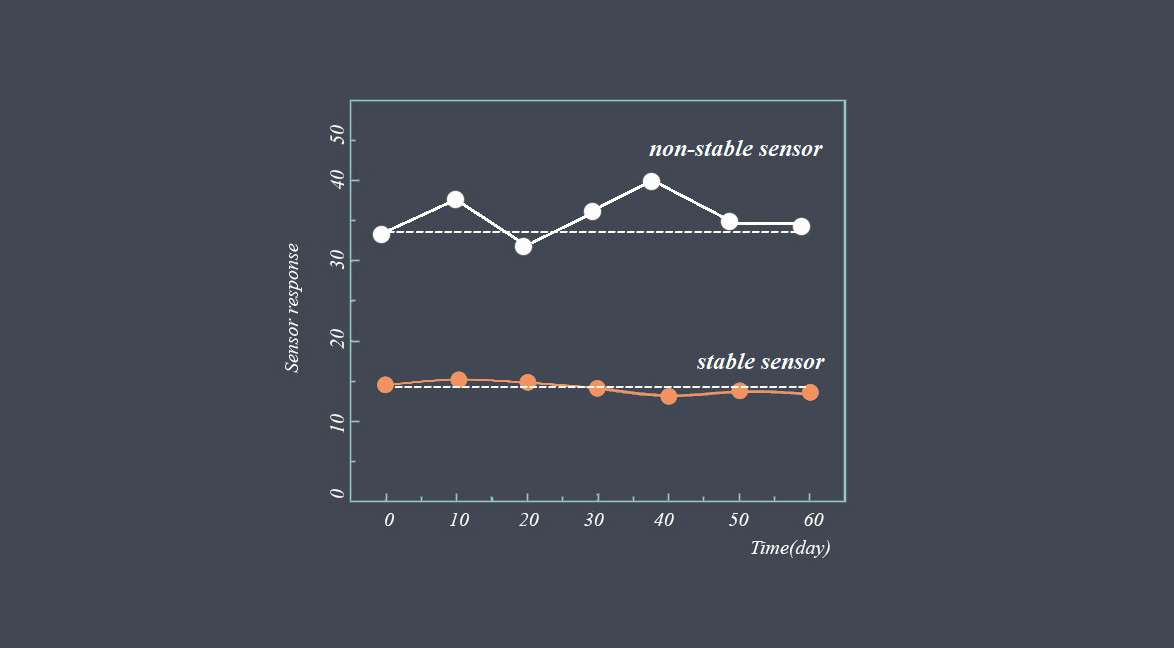
Drift is generally a slow and continuous process that affects the baseline behavior of the sensor, while unlike drift, hysteresis is not a gradual change over time but rather a property inherent to the sensor’s behavior.
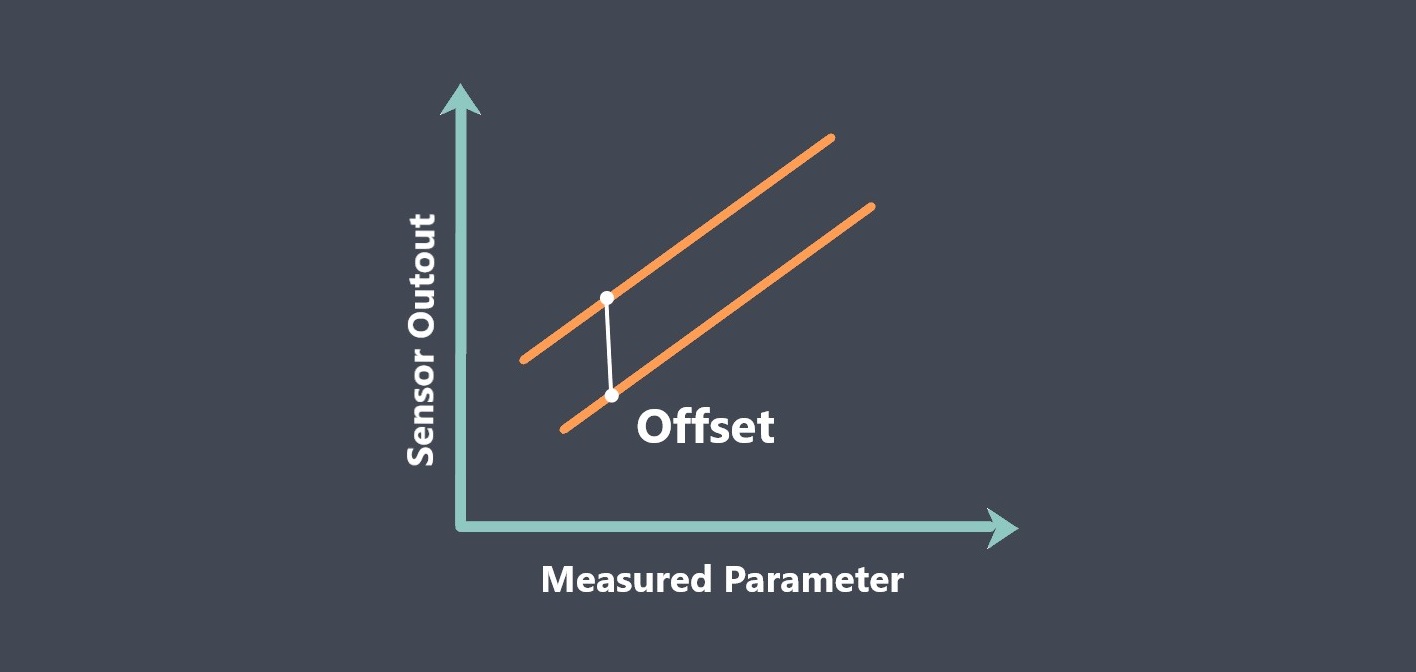
In summary, drift refers to a gradual change in the output value of a sensor over time, while hysteresis refers to the dependence of the sensor’s output on its previous history. Drift affects the baseline behavior of the sensor, leading to offset or sensitivity changes, while hysteresis introduces non-linearity and lag in the sensor’s response, especially during reversing or cyclic inputs. Both phenomena can contribute to measurement errors and should be considered when assessing the accuracy and reliability of sensor measurements.
What is Hysteresis Error?
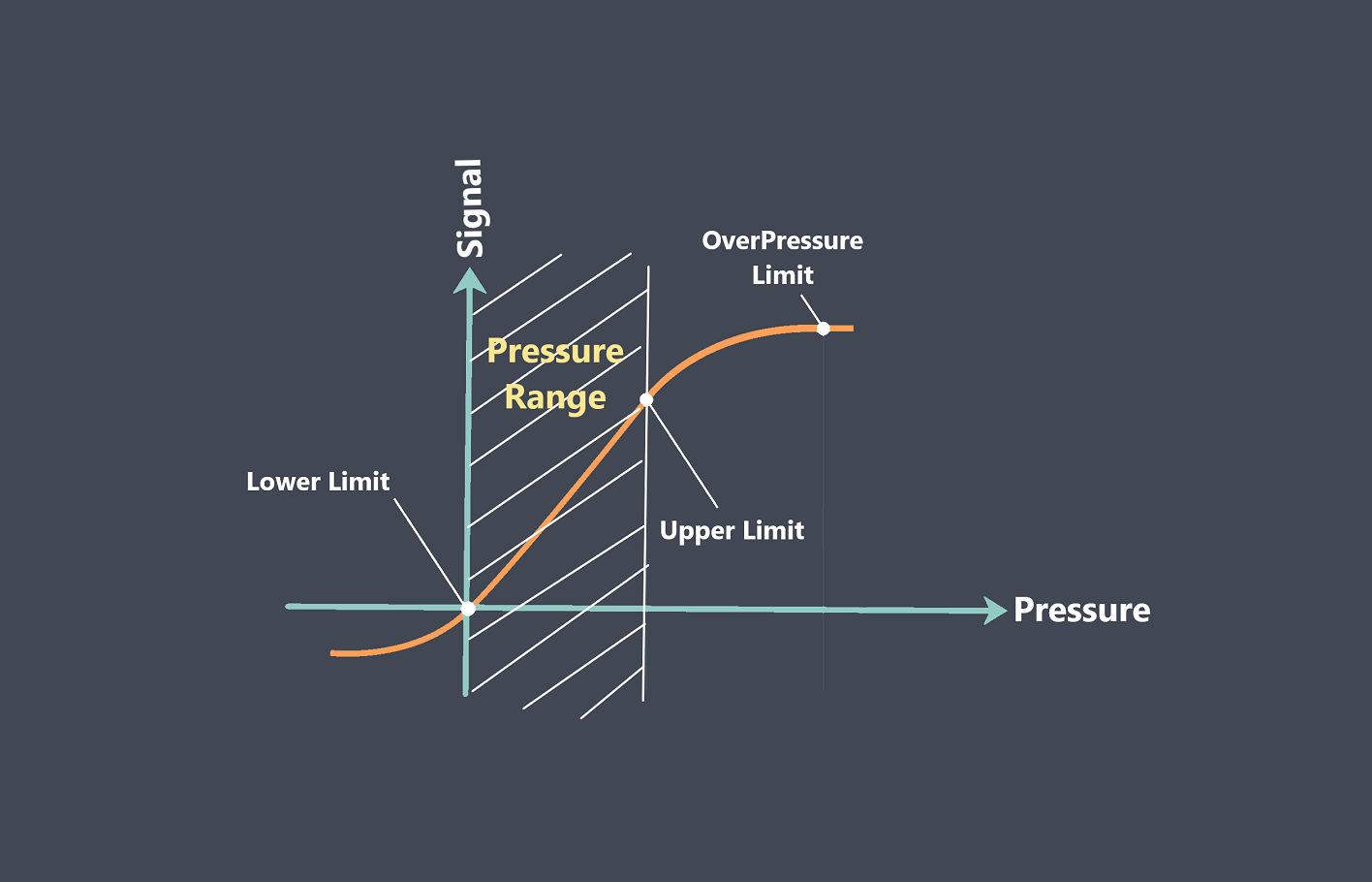
Hysteresis error refers to the difference in output readings of a sensor when measuring the same value during increasing and decreasing input conditions. It is primarily observed in sensors that measure physical quantities such as pressure, temperature, or displacement.
When a sensor operates within a certain range, it may exhibit hysteresis due to internal mechanical or electrical factors. These factors can cause delays or inconsistencies in the sensor’s response to changes in the measured quantity.
Hysteresis error is typically quantified as the maximum difference between sensor outputs during ascending and descending measurements for the same input value.
For example, if a pressure sensor registers a value of 100 units while the pressure is increasing and 95 units when the pressure is decreasing, the hysteresis error would be 5 units.
To mitigate hysteresis error, compensation techniques can be employed. This may involve calibrating the sensor and applying mathematical corrections to its output based on known hysteresis characteristics. Additionally, advanced sensor designs and materials with reduced hysteresis effects are utilized to minimize this error.
Hysteresis Error calculating formula
The formula for calculating the hysteresis error of a sensor depends on the specific type of sensor being used and the nature of the measurement being taken. Generally, the hysteresis error is calculated as the difference between the output signals obtained when the input signal is increasing and decreasing, expressed as a percentage of the full-scale range of the sensor.
For example, if a temperature sensor has a full-scale range of 0-100°C and its output signal is 5% higher when the temperature is increasing than when it is decreasing, the hysteresis error can be calculated as:
Hysteresis error= (105°C – 100°C) / 100°C * 100% = 5%
This means that the temperature sensor exhibits a hysteresis error of 5%, which can affect the accuracy of its measurements.
It’s important to note that the formula for hysteresis error will depend on the specific type of sensor being used and the nature of the measurement being taken.
How to reduce the Hysteresis of a sensor?
To minimize the effect of hysteresis on sensor measurements, it’s important to choose a sensor with low hysteresis error and to carefully calibrate the sensor to account for any hysteresis that may be present. Additionally, techniques such as averaging and filtering can be used to reduce the effects of hysteresis in the sensor’s output signal.
And also to reduce the hysteresis of a sensor, you can consider the following techniques:
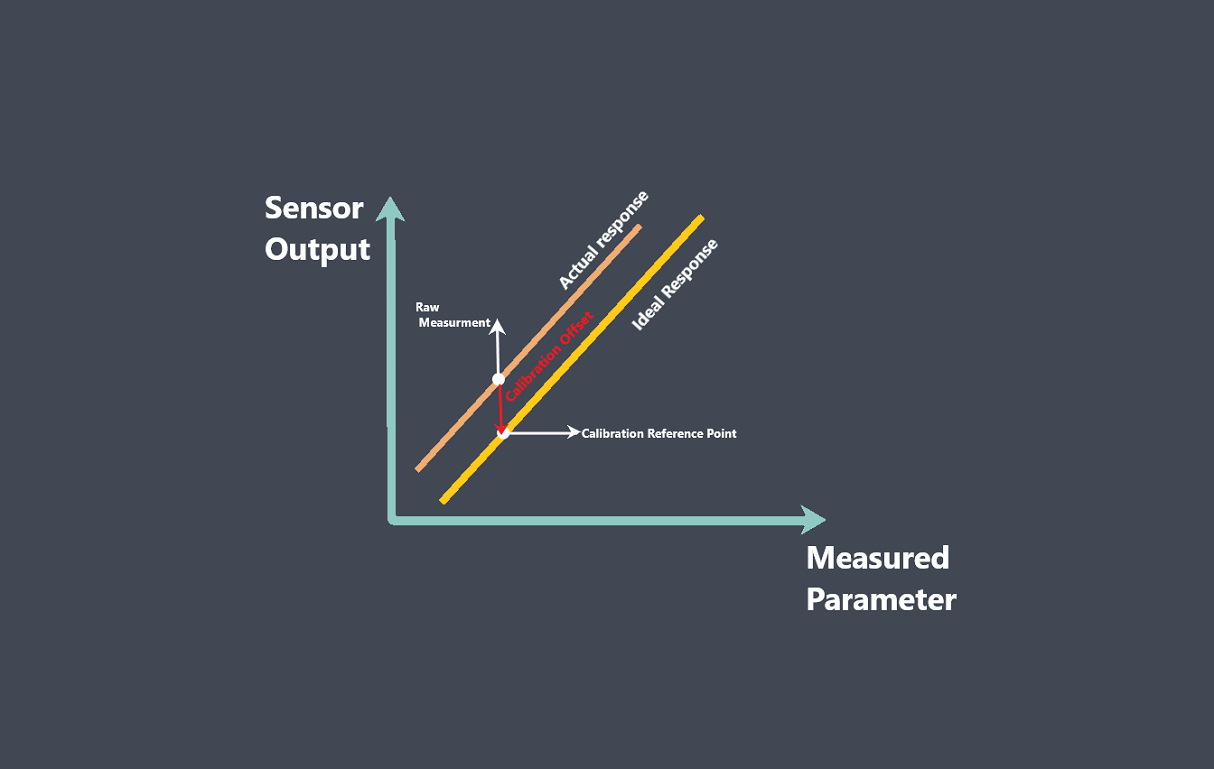
Calibration
Perform regular calibrations to correct the sensor’s output for any non-linearities or errors. This can help minimize the hysteresis effect.
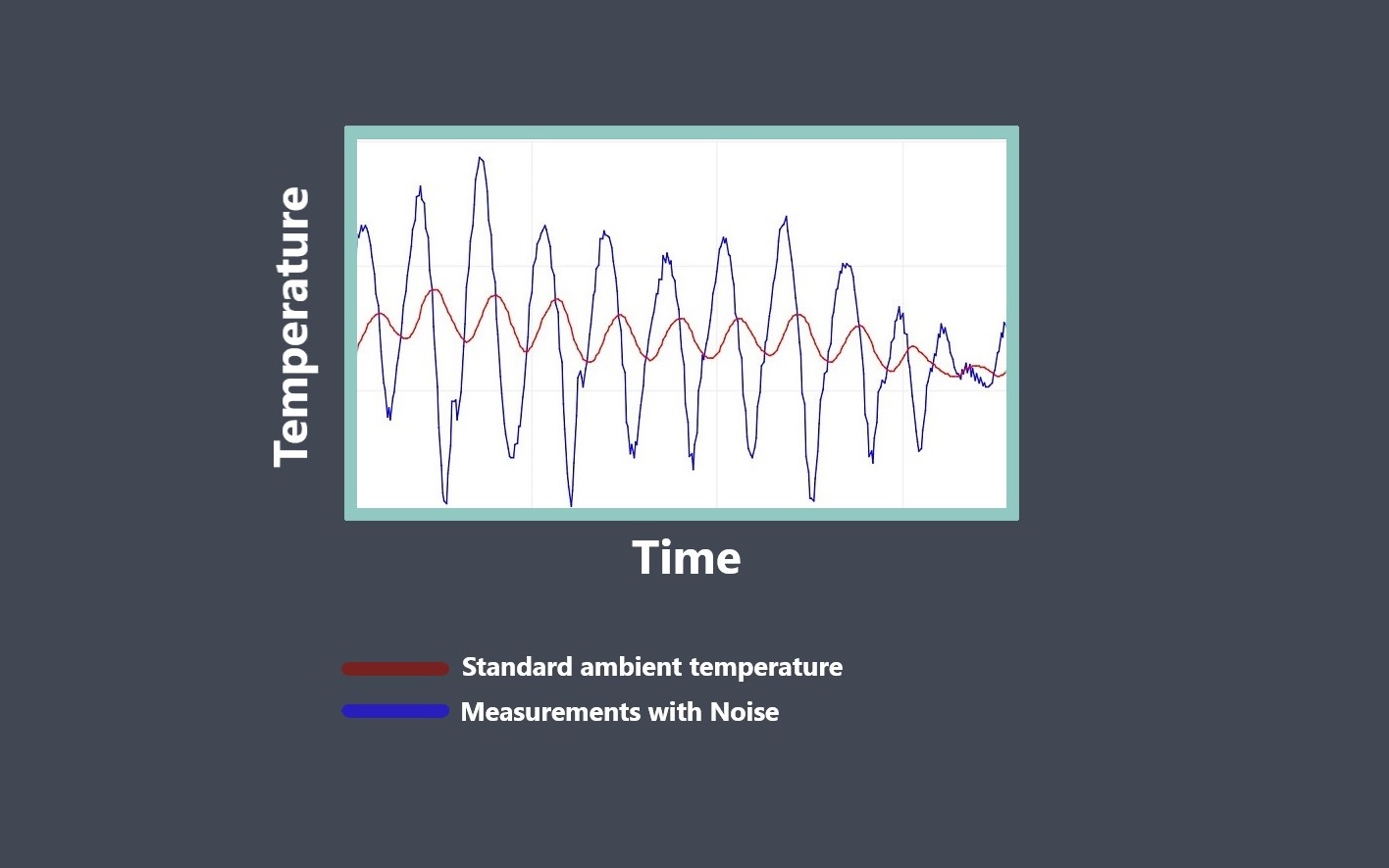
Filtering
Implement filtering techniques such as digital filters to smooth out the sensor readings and reduce noise or fluctuations that could contribute to hysteresis. Various filter types like low-pass filters or moving average filters can be used depending on the specific requirements.
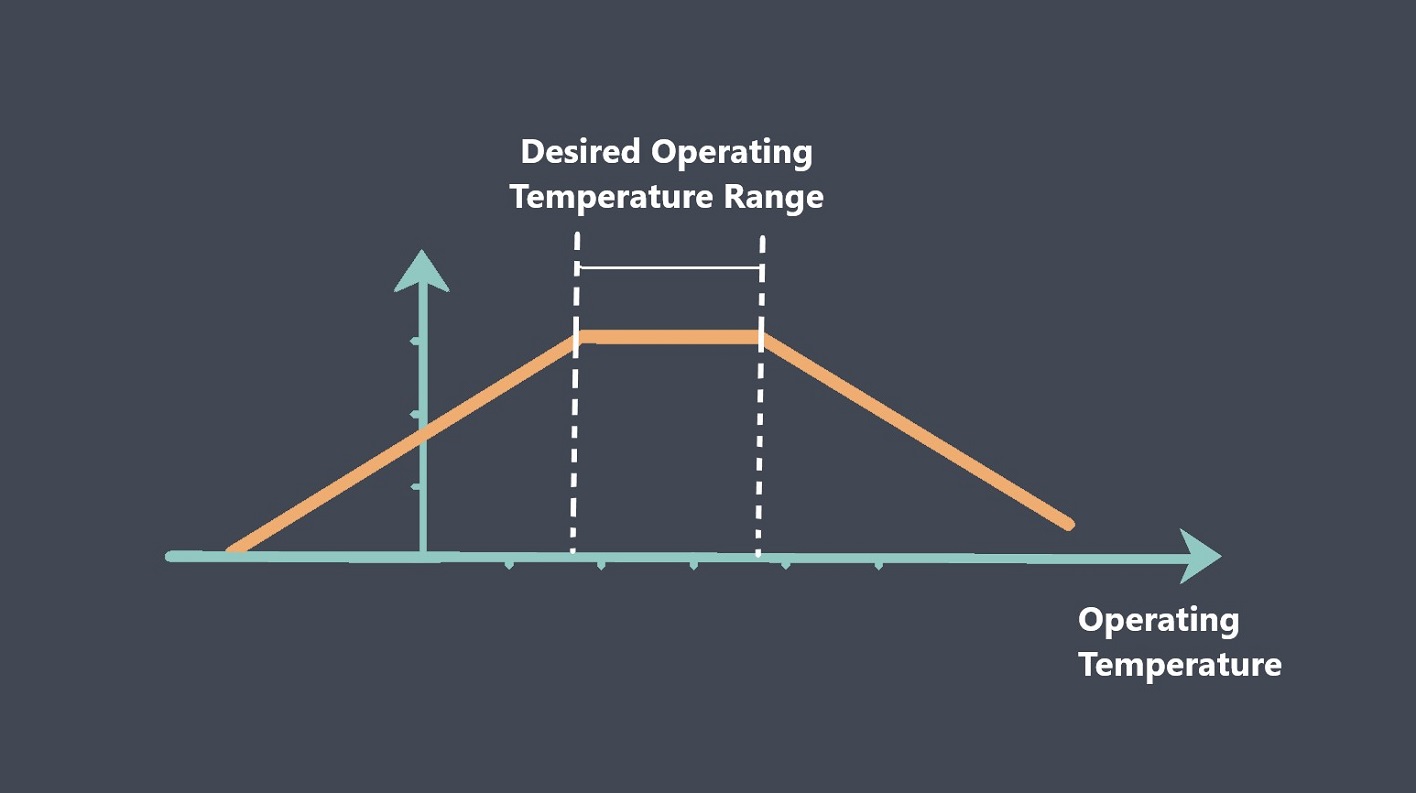
Temperature Compensation
If the sensor’s hysteresis is influenced by temperature variations, you can employ temperature compensation techniques. By measuring and compensating for the temperature changes, you can mitigate the impact of temperature on the hysteresis behavior of the sensor.
Mechanical Improvements
Consider improving the mechanical design and components related to the sensor. Ensure that there is minimal friction, play, or backlash in the sensor’s moving parts, as these factors can contribute to hysteresis. Lubrication, reducing mechanical tolerances, or using better quality materials can help minimize these issues.
Sensor Placement
Optimize the placement of the sensor in the system. Sometimes, hysteresis can result from external factors such as vibrations or electromagnetic interference. By carefully selecting the mounting location or implementing shielding measures, you can reduce the impact of these external influences.
Sensor Selection
If other methods are insufficient, you might need to consider selecting a different sensor with lower hysteresis characteristics. Consult sensor specifications and datasheets to compare hysteresis values among different sensor options and choose one that best fits your requirements.
Remember, the effectiveness of each method will depend on the specific sensor type, application, and environmental factors. It is recommended to consult the sensor manufacturer’s documentation and seek expert advice if needed.