
اهمیت مطالعه EMG در مهندسی پزشکی
الکترومایوگرافی (EMG) یکی از اصلیترین ابزارها برای بررسی فعالیت الکتریکی عضلات اسکلتی است و نقش مهمی در شاخههای مختلف مهندسی پزشکی، از جمله توانبخشی، مهندسی بافت، بیومکانیک، سیستمهای کمکی حرکتی، کنترل پروتزهای هوشمند و توسعه اگزواسکلتونهای رباتیک دارد.

EMG راهی برای مشاهده ارتباط میان سیستم عصبی و عضلات است؛ یعنی هر آنچه در سیستم عصبی مرکزی طراحی و صادر میشود، در عضله به شکل سیگنال EMG ظاهر میگردد. از این رو، تحلیل دقیق این سیگنال به ما کمک میکند منطق کنترل حرکتی بدن را بهتر بشناسیم و آن را در سامانههای مهندسیشده پیادهسازی کنیم.
سیگنال EMG عمدتاً دارای دامنه چند میلیولت (mV) و پهنای باندی در حدود ۱۰ تا ۱۰۰۰ هرتز است. این ویژگیها سبب میشود که طراحی یک دستگاه EMG نیازمند دقت بالایی در زمینه فیلترگذاری، تقویت، حذف نویز و ایمنسازی مدار باشد.
به همین علت، در این آموزش ابتدا ماهیت زیستی سیگنال توضیح داده میشود و سپس مبانی مهندسی پردازش آن بررسی خواهد شد.
ساختار و انواع عضله
بدن انسان دارای سه نوع عضله اصلی است:
- عضله اسکلتی (Skeletal Muscle):
- تحت کنترل ارادی
- متصل به استخوانها
- مخطط (دارای نوارهای تیره و روشن)
- منبع اصلی سیگنالهای EMG سطحی (sEMG)
- عضله قلبی (Cardiac Muscle):
- غیرارادی
- فقط در قلب
- سیگنال آن ECG است، نه EMG
- عضله صاف (Smooth Muscle):
- غیرارادی
- در احشاء و عروق
- فعالیت الکتریکی کندتر و متفاوت از عضلهٔ اسکلتی
از دید مهندسی پزشکی، بخش عمدهی اندازهگیریهای EMG روی عضلهٔ اسکلتی انجام میشود؛ زیرا حرکات بدن، توان تولیدی، خستگی و هماهنگی عضلات با سیگنال این نوع عضله قابل بررسی است.
واحد حرکتی (Motor Unit) و نقش آن در EMG
هر واحد حرکتی (Motor Unit) از یک نورون حرکتی (α-Motoneuron) در نخاع و همهٔ فیبرهای عضلانی تحت فرمان آن تشکیل میشود. هر بار که این نورون شلیک میکند، همهٔ فیبرهای متعلق به آن واحد حرکتی همزمان فعال میشوند.
در عضلات دقیق مانند چشم و انگشتان، یک نورون ممکن است تنها ۵ تا ۱۰ فیبر را کنترل کند.
در عضلات قوی مانند عضلات ران، این عدد میتواند به بیش از ۱۰۰۰ فیبر برسد.
هر بار فعال شدن یک واحد حرکتی باعث ایجاد Motor Unit Action Potential یا MUAP میشود؛ مجموعهای از پتانسیلهای عمل فیبرهای آن واحد. سیگنال EMG سطحی حاصل جمع جبری MUAPهای متعدد است که از عمقهای مختلف عضله به سطح پوست منتشر شدهاند.
پتانسیل عمل فیبر عضلانی
پتانسیل عمل عضله (Muscle Fiber Action Potential – MFAP) در اصل یک موج الکتریکی است که در طول فیبر حرکت میکند. این موج به دلیل ورود ناگهانی یون سدیم (Na⁺) و سپس خروج یون پتاسیم (K⁺) ایجاد میشود. به صورت خلاصه:
- حالت استراحت: حدود −۹۰ میلیولت
- دپولاریزاسیون: با تحریک کافی، ولتاژ به حدود +۱۰ میلیولت میرسد.
- رپولاریزاسیون: بازگشت به مقدار منفی
- دورهٔ مقاومت (Refractory Period): در این زمان فیبر نمیتواند تحریک جدید دریافت کند.
ارتباط EMG با نیروی عضله

عضله برای تولید نیروی بیشتر از دو راهبرد عصبی استفاده میکند:
الف) Recruitment – بهکارگیری واحدهای حرکتی بیشتر
در نیروهای کم، تنها واحدهای کوچک فعال میشوند. با افزایش نیاز به قدرت، واحدهای بزرگتر نیز وارد عمل میشوند. افزایش تعداد MUAPهای فعال باعث افزایش دامنهٔ EMG میشود.
ب) Firing Frequency – افزایش نرخ شلیک
هر واحد حرکتی در طول انقباض مداوم با فرکانس خاصی شلیک میکند (۱۰ تا ۵۰ هرتز). افزایش این فرکانس، همپوشانی MUAPها را بیشتر کرده و دامنهٔ سیگنال افزایش مییابد.
نکته مهم: بین نیروی عضله و سطح EMG ارتباط آماری قوی وجود دارد (ضریب همبستگی حدود ۰.۹). بنابراین EMG معیاری عملی برای تخمین نیرو، خستگی و الگوهای حرکتی محسوب میشود.
ویژگیهای فیزیکی و مهندسی سیگنال EMG سطحی
سیگنال الکترومایوگرافی سطحی (Surface EMG یا sEMG) سیگنالی است که از فعالیت الکتریکی مجموعهای از واحدهای حرکتی (Motor Units) عضلهٔ اسکلتی ناشی میشود و روی سطح پوست قابل اندازهگیری است. برخلاف سیگنالهایی مانند ECG که ساختار نسبتاً منظم دارند و فازها و قلههای مشخصی برایشان تعریف شده، سیگنال EMG از جنس «سیگنالهای شبهتصادفی (Quasi-random)» است و شکل موج آن فاقد الگوی دورهای منظم است.
اما همین سیگنال پیچیده و ظاهراً نامنظم، حامل اطلاعات بسیار مهمی دربارهٔ فیزیولوژی عضله، شدت انقباض، وضعیت خستگی، تعداد واحدهای درگیر و حتی سلامت سیستم عصبی–عضلانی است. بنابراین برای استخراج این اطلاعات، باید ویژگیهای فیزیکی آن را با دقت شناخت.
دامنه (Amplitude)
دامنه سیگنال EMG سطحی معمولاً بسیار کوچک است و در شرایط معمولی بین ۰ تا ۴ میلیولت پیکتوپیک تغییر میکند. در حالت استراحت، دامنه ممکن است تنها چند ده میکروولت باشد، اما با انقباض شدید عضله و فعال شدن تعداد زیادی واحد حرکتی، دامنه میتواند تا حدود میلیولت افزایش یابد.
نکات مهم دامنه برای طراحی مهندسی:
- سیگنال اصلی بسیار کوچک است → بنابراین به تقویتکننده با نویز ورودی بسیار پایین نیاز است.
- دامنه با شدت انقباض عضله افزایش مییابد → ویژگی مهم برای کنترل پروتزها و تخمین نیرو.
- دامنه تحت تأثیر ضخامت بافت چربی، فاصلهٔ الکترود تا عضله و وضعیت پوست قرار دارد → تغییرات فردبهفرد (Inter-subject variability).
این واقعیت که دامنهٔ EMG از نویز محیط و DC Offset بسیار کوچکتر است، یکی از بزرگترین چالشهای طراحی دستگاه EMG است.
باند فرکانسی (Frequency Bandwidth)
سیگنال EMG یک سیگنال باندگسترده (Broadband) است و بخش عمدهٔ انرژی آن در بازه ۱۰ تا ۱۰۰۰ هرتز قرار دارد.
- بخش انرژی اصلی: ۲۰ تا ۱۵۰ هرتز
- اطلاعات خستگی عضله: معمولاً ۴۰ تا ۹۰ هرتز
- فرکانسهای بالاتر از ۴۰۰ هرتز معمولاً نویز یا ناشی از MUAPهای تیز فیبرهای سریعالانقباض هستند.
- فرکانسهای پایینتر از ۲۰ هرتز غالباً مربوط به Motion Artifact هستند.
بنابراین، در طراحی فیلترها:
- High-pass filter: معمولاً در محدوده ۱۰–۲۰ هرتز قرار میگیرد
- Low-pass filter: معمولاً ۴۵۰–۵۰۰ هرتز انتخاب میشود
- Notch filter: در صورت نیاز، ۵۰/۶۰ هرتز برای حذف نویز برق شهر
در کاربردهای تحقیقاتی و بالینی، انتخاب دقیق این بازه مستقیماً روی کیفیت سیگنال و جلوگیری از اشباع تأثیر دارد.
ماهیت غیرایستا (Non-Stationary Nature)
یکی از ویژگیهای مهم EMG این است که خاصیت آماری آن در طول زمان تغییر میکند.
علت این موضوع عبارت است از:
- تغییر تعداد واحدهای حرکتی فعال
- تغییر نرخ شلیک نورونها
- تغییر سرعت هدایت عضلانی
- خستگی عضله
- تغییر وضعیت مکانی الکترود
- تغییر سطح تماس پوست–الکترود
به همین دلیل نمیتوان برای تحلیل EMG از روشهای سادهٔ سیگنال ثابت (Stationary) مثل FFT ساده استفاده کرد.
در حوزه مهندسی پزشکی روشهایی مثل:
- Wavelet Transform
- STFT
- Time-Frequency Analysis
- Entropy Measures
- EMG Envelope
بهطور فعال استفاده میشوند تا تغییرات لحظهای سیگنال را ثبت کنند.
رفتار شبهتصادفی (Random-like Behavior)
اگرچه سیگنال EMG شبیه نویز سفید تصادفی نیست، اما:
- ساختار دورهای واضح ندارد
- مجموعهای از هزاران MUAP است
- ترکیب خطی و غیرخطی MUAPها ایجاد «سیگنال مرکب» میکند
- از نظر شکل موج، حالت آشوبگونه دارد
این ظاهر شبهتصادفی سبب شده که:
- ویژگیهای آماری (RMS، میانگین مطلق، واریانس) اهمیت بیشتری نسبت به شکل موج پیدا کنند
- مدلسازی عضلانی–عصبی برای پروژههای کنترل پروتز پیچیده باشد
- سیگنال برای استخراج ویژگیهای «پیوسته» مناسبتر از ویژگیهای گسسته باشد
به همین دلیل، مهندسان معمولاً ابتدا سیگنال را Rectify + Filter کرده و سپس از «Envelope» برای کنترل پروتزها استفاده میکنند.
نویزها و عوامل مختلکننده سیگنال EMG
سیگنال EMG یکی از چالشبرانگیزترین سیگنالها از نظر نویز است.
بخش بسیار بزرگی از کار یک مهندس پزشکی، تلاش برای تقویت سیگنال واقعی و حذف نویزها است.

در ادامه، مهمترین منابع نویز بهصورت دقیق و کتابگونه بررسی میشود:
نویزهای الکترونیکی ذاتی (Intrinsic Electronic Noise)
این نویزها از قطعات الکترونیکی بهکاربردهشده در سیستم ناشی میشوند:
الف) نویز حرارتی (Thermal Noise)
در تمامی مقاومتها وجود دارد و به مقدار مقاومت و دمای آن وابسته است.
این نویز در ورودی تقویتکننده جمع شده و در صورت بزرگ بودن مقاومتهای ورودی، کیفیت EMG را کاهش میدهد.
ب) نویز شات (Shot Noise)
در المانهای نیمههادی مانند دیودها و ترانزیستورها ایجاد میشود و به جریان عبوری وابسته است.
ج) نویز 1/f یا Flicker Noise
این نویز در فرکانسهای پایین (زیر ۱۰۰ هرتز) غالب است و میتواند با بخش فرکانس پایین سیگنال EMG تداخل پیدا کند.
تداخل مد مشترک (Common Mode Interference)
بدن انسان بهعنوان یک جسم بزرگ رسانا، مانند آنتنی عمل میکند که نویز ۵۰ یا ۶۰ هرتز برق شهر و نویز میدانهای الکترومغناطیسی محیط را جمعآوری میکند.
این تداخلها به شکل ولتاژ مشترک روی هر دو الکترود اعمال میشود.
اگر سیستم تقویتکننده:
- CMRR بالا نداشته باشد
- پیکربندی صحیح الکترودها رعایت نشود
- پوست و الکترود امپدانس متفاوت داشته باشند
- کابلها شیلد نشده باشند
این نویز وارد سیگنال EMG میشود.
استانداردهای طراحی، CMRR بالاتر از ۹۰ تا ۱۱۰ دسیبل را برای تقویتکنندهٔ ابزار دقیق توصیه میکنند.
آرتیفکت حرکتی (Motion Artifact)
این نوع نویز غالباً در فرکانسهای زیر ۱۰ هرتز دیده میشود و ناشی از:
- حرکت الکترود روی پوست
- جابهجایی کابل
- تغییر امپدانس پوست–الکترود
- تنش مکانیکی روی سیمها
است.
Motion Artifact معمولاً از خود سیگنال مهمتر است، زیرا میتواند دامنهٔ بسیار بزرگی داشته باشد و باعث اشباع ورودی تقویتکننده شود.
به همین دلیل، در طراحی سیستم EMG معمولاً از یک High-pass filter با fc = 10–20 Hz استفاده میشود.
DC Offset ناشی از رابط پوست–الکترود
بین پوست و الکترود تماس الکتروشیمیایی برقرار میشود.
در این نقطه یک اختلاف ولتاژ نیمسلولی (Half-cell Potential) ایجاد میشود که ممکن است تا ۲۰۰ تا ۳۰۰ میلیولت برسد.
این مقدار ۵۰ تا ۱۰۰ برابر بزرگتر از سیگنال EMG واقعی است!
اگر این DC Offset حذف نشود:
- تقویتکننده را به اشباع میبرد
- فیلترهای بعدی را مختل میکند
- باعث از بین رفتن اطلاعات فرکانسی میشود
برای حذف این ولتاژ:
- از خازن سری با مقاومت بزرگ استفاده میشود (AC coupling)
- فیلترهای DC Rejection طراحی میشوند
- تکنیکهای حذف افست الکترونیکی در تقویتکنندهها بهکار میروند
نویز EMG عضلات مجاور (Crosstalk)
الکترود سطحی علاوه بر عضله هدف، فعالیت عضلات نزدیک را نیز ثبت میکند.
این پدیده Crosstalk نام دارد و به:
- ضخامت بافت چربی
- فاصلهٔ الکترود
- محل قرارگیری
- شدت انقباض عضلات اطراف
وابسته است.
Crosstalk یکی از چالشهای مهم در تحلیل EMG برای ارزیابی حرکت و کنترل پروتزهاست.

الکترود و رابط پوست–الکترود در EMG
الکترود نقطه اتصال سیستم مهندسی به بدن است؛ بنابراین کیفیت سیگنال مستقیماً به ویژگیهای الکترود بستگی دارد.
جنس الکترود
الکترودهای نقره–کلرید نقره (Ag/AgCl) رایجترین نوع الکترود در EMG هستند، زیرا:
- پایداری الکتروشیمیایی بالایی دارند
- نویز بسیار کم تولید میکنند
- Half-cell potential بسیار ثابت و قابل پیشبینی دارند
- برای استفادهٔ کلینیکی ایمن هستند
انواع دیگر مانند طلا یا استیل ضدزنگ نیز استفاده میشوند اما نویز آنها بالاتر است.
امپدانس پوست–الکترود
این امپدانس عامل تعیینکنندهٔ کیفیت سیگنال است.
امپدانس بالا باعث:
- ورود نویز
- افزایش Motion Artifact
- کاهش CMRR
- افزایش DC Offset
میشود.
برای کاهش امپدانس باید:
- پوست تمیز، خشک و بدون چربی باشد
- موی اضافی تراشیده شود
- از ژل رسانا استفاده شود
- الکترود بهدرستی چسبانده شود
اندازه و شکل الکترود
هر چه سطح تماس الکترود با پوست بیشتر باشد:
- امپدانس کمتر
- نویز کمتر
اما پهنای باند نیز محدودتر خواهد شد.
الکترودهای بزرگ برای EEG مناسباند اما برای EMG که پهنای باند تا ۵۰۰ هرتز دارد، الکترودهای با قطر ۱۰ میلیمتر بهترین گزینه هستند.
فاصله بین دو الکترود (Inter-electrode Distance)
در پیکربندی Bipolar از دو الکترود استفاده میشود. فاصلهٔ استاندارد معمولاً ۲۰ میلیمتر است.
اگر فاصله زیاد شود:
- Crosstalk افزایش مییابد
- نویز ناشی از عضلات دیگر وارد سیگنال میشود
اگر فاصله خیلی کم شود:
- دامنه EMG کاهش مییابد
- سیگنال بیشازحد محلی میشود
بنابراین انتخاب فاصله صحیح یکی از پایههای سیستمهای استاندارد EMG است.
تأثیر حرکت و وضعیت الکترود
حتی جابهجایی یک میلیمتری الکترود میتواند:
- امپدانس را تغییر دهد
- Motion Artifact تولید کند
- دامنه سیگنال را تغییر دهد
- الگوی عضلانی را مخدوش کند
به همین دلیل در کاربردهای طولانیمدت مانند EMG راهرفتن، از الکترودهای چسبدار قوی استفاده میشود.
نویزها کاربردهای بالینی و مهندسی سیگنال EMG
سیگنال الکترومایوگرافی (EMG) نهتنها یکی از ابزارهای مهم برای ارزیابی عملکرد سیستم عصبی–عضلانی است، بلکه بهعنوان یک ورودی هوشمند در سامانههای نوین مهندسی پزشکی و تکنولوژیهای تعامل انسان–ماشین نقش بنیادی ایفا میکند.
تنوع اطلاعات موجود در سیگنال EMG باعث شده این سیگنال در دهها حوزهٔ علمی و صنعتی به کار رود: از توانبخشی بیماران و کنترل پروتزهای هوشمند گرفته تا تحلیل بیومکانیک حرکت، ساخت اگزواسکلتونها، ارگونومی صنعتی، پایش خستگی رانندگان و کارگران، بازیدرمانی و حتی حفاظت سایبری بیومتریک.
شناخت عمقی کاربردهای EMG به دانشجوی مهندسی پزشکی کمک میکند که پیوند میان فیزیولوژی، مهندسی، الکترونیک و هوش مصنوعی را در یک سامانهٔ واقعی مشاهده کند. در ادامه، کاربردهای مهم EMG در چهار گروه اصلی بهصورت کامل و مفصل بررسی میشود.
توانبخشی و پروتزهای هوشمند مبتنی بر EMG
تنوع اطلاعات موجود در سیگنال EMG باعث شده این سیگنال در دهها حوزهٔ علمی و صنعتی به کار رود: از توانبخشی بیماران و کنترل پروتزهای هوشمند گرفته تا تحلیل بیومکانیک حرکت، ساخت اگزواسکلتونها، ارگونومی صنعتی، پایش خستگی رانندگان و کارگران، بازیدرمانی و حتی حفاظت سایبری بیومتریک.
مقدمه توانبخشی عصبی–عضلانی
توانبخشی عصبی–عضلانی (Neuromuscular Rehabilitation) فرآیندی است برای بازگرداندن عملکرد حرکتی افراد دچار نقص حرکتی یا قطع عضو. EMG در این فرآیند نقش محوری دارد زیرا اندازهٔ انقباض عضله، کیفیت فعالسازی عصبی و هماهنگی حرکتی را با دقت ثبت میکند.
EMG در توانبخشی به دو منظور استفاده میشود:
- پایش وضعیت عضله
- ایجاد یک ورودی عصبی برای کنترل پروتز یا ربات توانبخشی
پروتزهای کنترلشونده با EMG (Myoelectric Prostheses)
در افرادی که دست یا پا را از دست دادهاند، عضلات باقیمانده در اندام قطعشده همچنان توسط سیستم عصبی مرکزی فرمان میگیرند.
این عضلات اگرچه دیگر به مفصل متصل نیستند، اما هنگام تلاش فرد برای حرکت، سیگنال EMG تولید میکنند.
در پروتزهای Myoelectric:
- الکترودهای سطحی روی عضلات باقیمانده قرار میگیرند.
- پس از پردازش سیگنال، الگوهای فعالیت EMG تحلیل میشود.
- این الگوها برای کنترل موتورهای پروتز استفاده میشوند.
مزایای این روش:
- کنترل طبیعی و شهودی
- عدم نیاز به حرکات جبرانی با شانه یا تنه
- قابلیت یادگیری در بیماران
- امکان تبدیل EMG به حرکات چندگانه
چالشهای پژوهشی در این حوزه
- همپوشانی عضلات مجاور (Crosstalk)
- تغییر EMG با خستگی
- تغییر محل الکترود
- نیاز به الگوریتمهای یادگیری ماشینی پایدار
- حذف نویز محیطی
بنابراین طراحی پروتزهای هوشمند EMG یکی از فعالترین شاخههای تحقیقاتی مهندسی پزشکی
رباتهای توانبخشی حرکتی
در سکته مغزی، آسیب نخاعی یا MS، بیمار توانایی کنترل اندام را از دست میدهد، اما مسیرهای عصبی–عضلانی ممکن است هنوز قابل تحریک باشند.
رباتهای توانبخشی EMG-Driven حرکت بیمار را بر اساس سیگنال EMG تقویت یا هدایت میکنند.
سه نمونه از کاربردهای ربات توانبخشی مبتنی بر EMG:
۱. تشخیص قصد حرکت (Intention Detection)
ربات از EMG میفهمد بیمار قصد حرکت دارد و حرکت را کامل میکند.
۲. کمک به حرکت (Assist-as-needed)
سیستم فقط زمانی کمک میکند که EMG بیمار نشان دهد حرکت ناقص است.
۳. آموزش مجدد مغز (Neuroplasticity-based Training)
ترکیب تلاش بیمار + تحریک ربات باعث شکلگیری مسیرهای عصبی جدید میشود.
بیومکانیک و ارزیابی حرکت
بیومکانیک علمی است که به تحلیل نیروها، گشتاورها، زنجیرههای حرکتی و الگوهای فعالیت عضلات در حرکت انسان میپردازد. EMG یکی از کلیدیترین ابزارها در این علم است زیرا:
- فعالیت لحظهای عضله را نشان میدهد
- ترتیب فعالسازی عضلات را نشان میدهد
- میزان تلاش عضلات برای انجام یک حرکت را اندازهگیری میکند
- عملکرد عصبی–عضلانی را به شکل کمی تحلیل میکند
EMG در تحلیل گامبرداری (Gait Analysis)
در آزمایشگاههای حرکتی، الکترودهای EMG روی عضلات ران، ساق، باسن و ساق پا قرار داده میشود. EMG کمک میکند:
- بفهمیم کدام عضلات چه زمانی در چرخهٔ راهرفتن فعال میشوند.
- شدت فعالیت عضله در مرحلهٔ Contact یا Swing چقدر است.
- حرکات بیمار MS، پارکینسون یا سکته چگونه از الگوی طبیعی منحرف شدهاند.
- چه عضلاتی دچار ضعف یا هماهنگی نامناسب هستند.
نتایج این تحلیل در:
- تجویز بالشتکهای مخصوص کفش
- طراحی بریس یا ارتز
- ارزیابی پیشرفت درمان
به کار میرود.
EMG و مدلسازی عضلانی–اسکلتی
مدلسازی عضلانی (Musculoskeletal Modeling) یکی از حرفهایترین کاربردهای EMG است. در این روش:
- حرکت بدن با دوربینهای سهبعدی ثبت میشود.
- نیروها و گشتاورها محاسبه میشود.
- EMG بهعنوان ورودی برای برآورد نیروی عضله استفاده میشود.

این روش برای:
- طراحی ورزشهای درمانی
- جلوگیری از آسیبهای ورزشی
- تحلیل فشار روی زانو و ستون فقرات
- طراحی جراحیهای ارتوپدی
به کار میرود.
ارگونومی و پزشکی کار (Occupational Health)
ارگونومی علمی است که به طراحی محیط کار برای کاهش خستگی، جلوگیری از آسیب و افزایش بهرهوری میپردازد. EMG یکی از دقیقترین ابزارها در این حوزه است.
پایش خستگی عضلات
خستگی عضلانی دو اثر مشخص روی EMG میگذارد:
- کاهش فرکانس میانه (Median Frequency)
- افزایش دامنهٔ سیگنال (RMS)
با پایش این تغییرات:
- میتوان تعیین کرد کارگر چه زمانی باید استراحت کند
- میتوان ارزیابی کرد کدام فعالیت بیشترین فشار را ایجاد میکند
- خطرات آسیبهای اسکلتی–عضلانی کاهش مییابد
تحلیل حرکات صنعتی
در کارخانهها، حمل بار یا کار تکراری ممکن است باعث:
- کشیدگی عضلات
- دردهای مزمن
- آسیبهای گردن و کمر
امروزه متخصصان از EMG برای:
- شناسایی حرکات پرخطر
- بهینهسازی روش کار
- انتخاب مجهزترین ابزار
- طراحی صندلی و میز ارگونومیک
استفاده میکنند.
رابطهای انسان–ماشین، رباتیک و اگزواسکلتونها
یکی از پیشرفتهترین کاربردهای EMG در «سیستمهای تعامل انسان–ماشین (HMI)» و «رباتیک» دیده میشود.
اگزواسکلتونهای توانافزا
اگزواسکلتونها رباتهایی هستند که روی بدن نصب میشوند برای:
- افزایش قدرت
- کاهش خستگی
- کمک به راهرفتن بیماران
EMG در این رباتها بهصورت مستقیم برای تشخیص قصد حرکت انسان استفاده میشود.
نمونهها:
- فرد قصد بلند کردن جسم دارد → EMG افزایش مییابد → ربات کمک میکند.
- فرد میخواهد زانو را خم کند → ربات فرمان مربوطه را اجرا میکند.
این سیستمها در ارتش، صنعت و توانبخشی کاربرد دارند.
بازیهای EMGمحور و واقعیت مجازی

در بازیدرمانی برای کودکان یا بیماران سکته، EMG بهعنوان ورودی بازی استفاده میشود.
بیمار برای حرکت دادن شخصیت بازی مجبور به فعالسازی عضلهٔ خاص است، که باعث تمرین عصبی–عضلانی میشود.
کنترل ربات از راه دور
در برخی پروژههای پیشرفته، چند کانال EMG برای کنترل رباتهای صنعتی یا بازوهای رباتیک استفاده میشود.
فرایند شامل:
- تبدیل EMG به مقادیر RMS
- استخراج ویژگیهای فرکانسی
- تشخیص الگو (Pattern Recognition)
- تبدیل آن به فرمانهای کنترلی
است.
کاربردهای EMG در هوش مصنوعی و امنیت بیومتریک
تشخیص الگوهای عصبی (Neural Pattern Recognition)
الگوهای EMG هر انسان تا حد زیادی منحصربهفرد است.
در پژوهشهای جدید:
- EMG برای تشخیص هویت
- ورود به سیستمهای امنیتی
- رمزهای بیولوژیک شخصی
استفاده میشود.

EMG و یادگیری عمیق
الگوریتمهای CNN، LSTM و Transformers برای:
- تشخیص ژست دست
- تحلیل تلاش حرکتی
- ساخت پروتز با یادگیری مستمر
به کار رفتهاند.
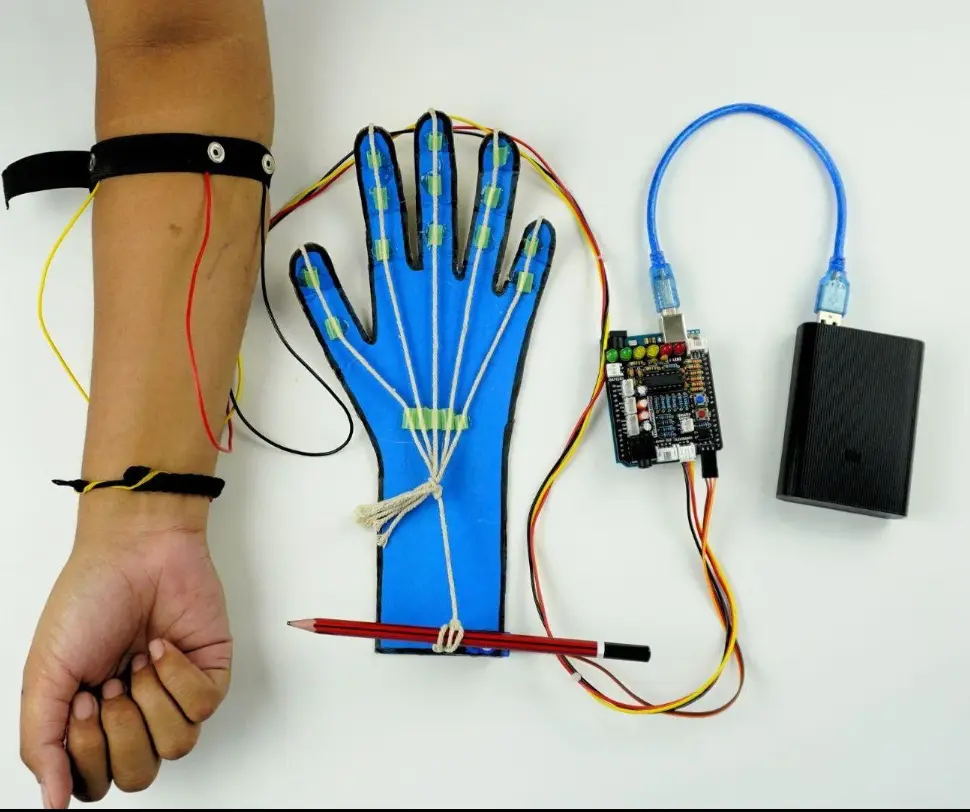
طراحی و ساخت پروتوتایپ EMG
در این فصل، طراحی کامل مدار سامانه چندکاناله ثبت EMG را بر اساس ساختار تز «طراحی و ساخت پروتوتایپ سامانه چندکاناله EMG» تنظیم میکنیم؛ یعنی همان تقسیمبندی بلوکی: الکترودها → حفاظت ESD → حذف DC → تقویت → DRL → فیلترینگ → ایزولاسیون → مبدل ADC

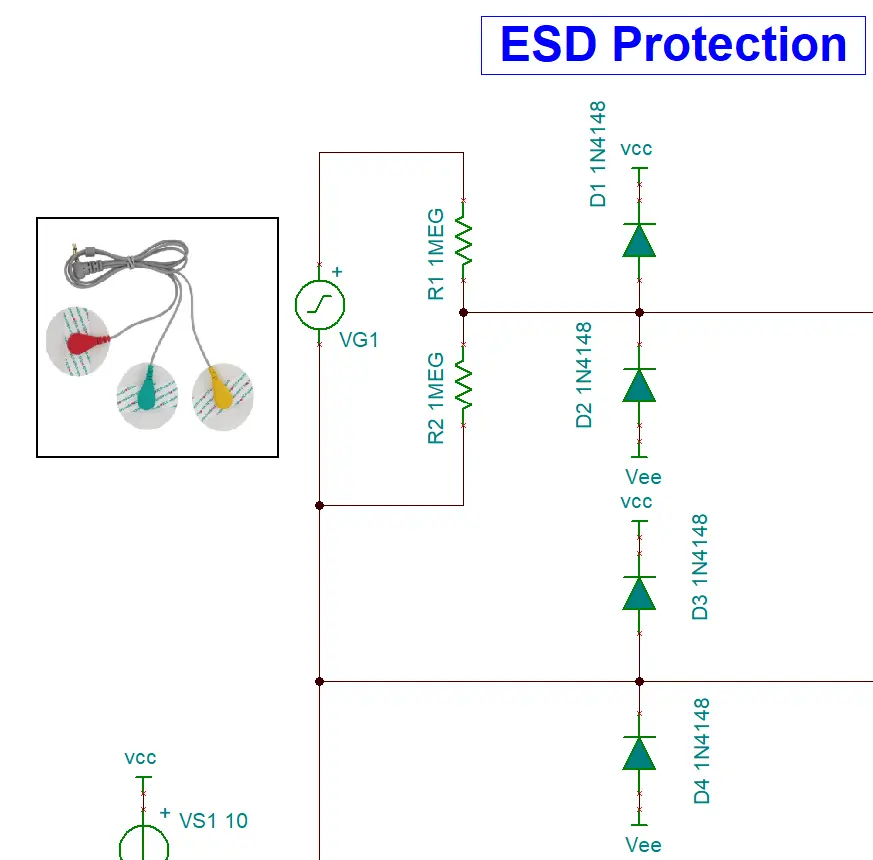
حفاظت الکترواستاتیک (ESD Protection)
الکترودهای سطحی روی پوست، مستقیماً نقطهی ورود تمام پدیدههای ناخوشایند به سیستم هستند:
- تخلیههای الکترواستاتیک ناشی از تماس دست، لباس، حرکت بیمار روی تخت و …
- اتصال اشتباه یا برخورد تصادفی کابل به منابع ولتاژ بالا (مثلاً تجهیزات بیمارستانی)
- نویز و پالسهای سریع با شیب زیاد (dv/dt بالا)
بدون مرحلهٔ ESD، همین تخلیهها میتوانند در چند نانوثانیه، ورودی آمپلیفایر ابزار دقیق گرانقیمت را بسوزانند یا حداقل، پارامترهای آن را خراب کنند.
ساختار کلی حفاظت ESD
الگوی رایج این است:
- مقاومت سری کوچک در هر ورودی (مثلاً ۱k–10kΩ)
- دیودهای محافظ سریع (ESD / TVS دیود) به ریلهای تغذیه یا به ریلهای محافظ
- شبکه RC برای آرامکردن لبههای خیلی تند در صورت لزوم
طرح نمونه هر کانال:
- الکترود + → مقاومت سری R_IN → گره ورودی آمپلیفایر
- روی گره ورودی: یک جفت دیود (یا شبکهٔ آرایهای) به +V و –V (یا به ریلهای محافظ محدود شده)
- در بعضی طرحها، یک خازن کوچک (مثلاً ۱۰–۴۷pF) از گره ورودی به زمین آنالوگ برای کاهش EMI با فرکانس خیلی بالا استفاده میشود، بدون اینکه باند EMG را (۱۰Hz–۱kHz) جدی تضعیف کند.
ملاحظات طراحی
مقاومت سری نباید آنقدر بزرگ باشد که با ظرفیت ورودی تقویتکننده، یک فیلتر پایینگذر با فرکانس قطع خیلی پایین بسازد (که باعث تضعیف سیگنال EMG شود).
دیودها باید:
- سرعت سوئیچینگ بالا و ظرفیت خازنی کم داشته باشند.
- ولتاژ کلمپ آنها بالاتر از ماکزیمم سیگنال مفید (چند میلیولت) و پایینتر از حد تحمل ورودی آمپلیفایر باشد (مثلاً حدود ±۵–۱۰ ولت).
مسیرهای ESD (از دیود به زمین یا ریل تغذیه) باید کوتاه و مستقیم باشند تا جریان تخلیه از روی مسیرهای ظریف سیگنال عبور نکند.
حذف مؤلفه DC (DC Rejection)
در در مدل تز، ورودی سیستم فقط سیگنال EMG نیست؛ دو مؤلفه مهم دیگر هم وجود دارند: نویز مود مشترک و آفست DC الکترود–پوست.
- این آفست میتواند صدها میلیولت تا حتی بیش از ۳۰۰mV باشد.
- اگر مدار تقویتکنندهی با بهرهی ۱۰۰۰ داشته باشیم، همین ۳۰۰mV بعد از تقویت، به ۳۰۰ ولت معادل میرسد (که عملاً باعث اشباع کامل میشود).
پس باید قبل از اعمال سیگنال به مراحل تقویت با بهرهی بالا، DC را حذف کنیم.
DC Rejection بهصورت فیلتر بالاگذر
الگوی رایج این است:
راه کلاسیک: استفاده از یک بالاگذر RC در ورودی:
- خازن سری C_HP در مسیر سیگنال
- مقاومت R_B به زمین برای ایجاد مسیر بایاس
فرکانس قطع:

برای EMG، معمولاً f_c ≈ ۵–۲۰Hz انتخاب میشود تا:
- هم آفست DC و هم حرکات خیلی آهسته (درایفت خط مبنا) حذف شوند،
- و هم باند مفید EMG (مثلاً ۱۰–۱۰۰۰Hz) حفظ شود.هم آفست DC و هم حرکات خیلی آهسته (درایفت خط مبنا) حذف شوند،
- و هم باند مفید EMG (مثلاً ۱۰–۱۰۰۰Hz) حفظ شود.
مسئله CMRR و «مقاومتهای زمیندار»
در طراحی تز، یک نکته مهم آموزشدادنی این است که اگر برای هر ورودی، مقاومتهای زمیندار متفاوتی استفاده شود، نامتقارنشدن امپدانس دو مسیر باعث تبدیل مود مشترک به مود تفاضلی میشود و CMRR را تخریب میکند.
برای همین تز یک ساختار نوآورانهٔ DC rejection بدون مقاومتهای متصل به زمین پیشنهاد میکند تا:
- مسیرهای ورودی A و B کاملاً متقارن باشند؛
- حذف DC بهصورت تفاضلی انجام شود؛
- CMRR جلوی تقویتکنندهی ابزار دقیق حفظ شود.
برای فصل شما میتوان این را آموزشی توضیح داد:
- ابتدا ساختار بالاگذر ساده را نشان دهید،
- سپس توضیح بدهید که این ساختار چگونه باعث mismatch امپدانس و کاهش CMRR میشود،
- و در نهایت، ساختار متقارن (مثلاً شبکهای که خازنها و مقاومتها بهصورت متقارن بین دو ورودی و خروجی مرجع قرار دارند) را معرفی کنید که بدون اتصال به زمین، DC را حذف میکند.
بررسی بلوک DC-Rejection / High-pass Differential Filter
این بلوک یکی از مهمترین بخشهای ورودی EMG است و دقیقاً قبل از INA114 قرار میگیرد و نقش بسیار مهمی دارد.
حذف DC و ولتاژهای بایاس الکترودها
الکترودهای EMG همیشه چند ده میلیولت DC روی خودشان دارند.اگر این DC وارد INA شود آمپلیفایر کاملاً اشباع میشود.این فیلتر طوری طراحی شده که فقط AC (سیگنال EMG) را عبور دهد و DC را حذف کند.
ایجاد فیلتر High-Pass بسیار فرکانس پایین
با استفاده از:
- C1, C3 = 3.3 µF
- مقاومتهای 4.99 MΩ
فرکانس قطع (Cutoff):

یعنی:
فیلتر HP با f_c ≈ 0.01Hz خیلی آرام DC را حذف میکند و سیگنال EMG را دست نمیزند.
کاملاً متقارن است (Symmetrical Network)
- با استفاده از شاخه چپ = شاخه راست
- R1 = R3 = 4.99M
- R6 = R2 = 4.99M
- C1 = C3 = 3.3µF
این تقارن باعث میشود:
۵۰Hz کامنمود تبدیل به دیفرانسیلی نشود.
CMRR سیستم فوقالعاده بالا برود.
فلاکت ناشی از mismatch ایمپدانس از بین برود.
این دقیقاً همان تکنیکی است که در سیستمهای حرفهای پزشکی استفاده میشود.
جلوگیری از تقویت DC توسط گین ۲۰۰۰× INA114
اگر از این شبکه استفاده نشود:
10mV DC offset الکترود
× گین 2000
= 20V → اشباع سریع
بنابراین این شبکه یک نقش حیاتی دارد.
توضیح هر بخش
C1 و C3 (3.3µF)
خازنهای AC coupling برای حذف DC
ورودی را شناور میکنند ولی مقدارشان زیاد است که فرکانس پایین EMG خراب نشود.
R1, R2, R3, R6 (4.99MΩ)
تعیینکننده ثابت زمانی فیلتر
حفظ تقارن امپدانس در دو مسیر
جلوگیری از مدل شدن 50Hz کامنمود به سیگنال دیفرانسیل
خطای جسم انسان (body impedance mismatch) را کنترل میکنند
مقاومتهای افقی وسط
این ریل وسط شبکه باعث میشود:
- نقطه وسط DC ثابت شود
- فیلتر پایدار شود
- اختلاف DC بین دو ورودی به مرور حذف شود
این بلوک دقیقاً یک فیلتر High-Pass دیفرانسیلی متقارن برای حذف DC و جلوگیری از اشباع و افزایش CMRR مخصوص Front-End EMG/EEG/ECG حرفهای است. بدون این بلوک، سیستم EMG تز اول اصلاً درست کار نمیکند و INA114 بلافاصله اشباع میشود.
تقویت (Amplification)
طبق مدل سیگنال تز، دامنهٔ EMG سطحی حدود چند میلیولت پیکتوپیک (مثلاً ±۴mV) و باند فرکانسی حدود ۱۰Hz تا ۱kHz در نظر گرفته شده است.
فرض کنیم مبدل ADC ما در سمت خروجی، رنج ۰ تا ۳٫۳ ولت (یا ±۲٫۵ ولت) دارد. برای استفادهٔ مناسب از این رنج:
- اگر دامنهٔ ورودی ۴mV باشد و بخواهیم آن را به حدود ۲V پیکتوپیک برسانیم، به بهرهای در حدود:
نیاز داریم. با درنظرگرفتن حاشیه برای عضلات قویتر و امکان اشباع، معمولاً بهرهٔ بین ۵۰۰ تا ۱۰۰۰ در کل زنجیره انتخاب میشود که در چند مرحله تقسیم شده است.
آمپلیفایر ابزار دقیق (Instrumentation Amplifier)
این مرحله نزدیکترین بخش فعال به الکترودهاست. نقشها:
- تبدیل سیگنال تفاضلی کوچک به یک ولتاژ تکسر (single-ended) نسبت به مرجع.
- داشتن امپدانس ورودی خیلی بالا (حداقل > ۱۰۰MΩ) برای جلوگیری از لود کردن منبع بیولوژیک.
داشتن CMRR زیاد برای رد کردن نویزهای مود مشترک (مثلاً ۱۰۰dB و بالاتر).
یک in-amp سهاپاَمپی استاندارد:
- یک اپاَمپ دیفرانسیل در خروجی،
- بهره با یک مقاومت RG تنظیم میشود:
همانطور که در تز هم اشاره شده، با تقسیم RG به دو قسمت مساوی، میتوان گره وسط را برای استخراج سیگنال مود مشترک استفاده کرد (که در DRL به کار میآید).
Instrumentation Amplifier (INA114) با تنظیم گِین از طریق Rg
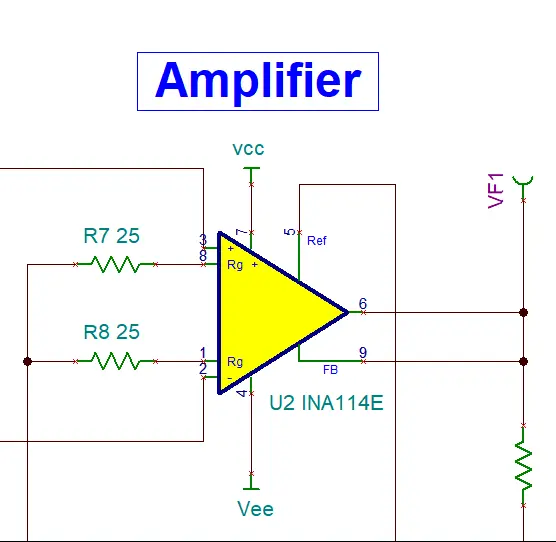
این بلوک قلبِ کل مدار EMG هست و وظیفهاش تقویت دیفرانسیلی سیگنال EMG (در حد چند میلیولت) تا ولتاژ چند ولت با CMRR بسیار بالاست.
این مدار دقیقاً چه کار میکند؟
۱. سیگنال EMG خام (۱ تا ۵ میلیولت) را به ۱ تا ۵ ولت تقویت میکند .این اولین و مهمترین مرحله تقویت است.
۲. فقط اختلاف (Differential) بین دو الکترود را تقویت میکندو هر نویز مشترک (۵۰Hz و نویز بدن) را حذف میکند.
۳. گین (Gain) با دو مقاومت R7 و R8 = 25Ω تنظیم میشود .در INA114، این مقاومتها با هم سری تشکیل Rg میدهند.
گِین این مدار چقدر است؟
فرمول گین INA114:
اینجا:
- R7 = 25Ω
- R8 = 25Ω
- پس Rg = 25Ω + 25Ω = 50Ω
اما توجه:
در شماتیک ، هر ورودی Rg جدا داره، پس 25Ω برای هر شاخه هست
و فرمول دیتاشیت میگه اگر 2×25Ω استفاده بشه، معادل استفاده از 25Ω خالصه.
بنابراین:

و گین:

پس تقویتکننده تقریباً ۲۰۰۰ برابر ورودی را تقویت میکند.
که در عمل به صورت تقریبی گین ۱۴۰۰–۲۰۰۰ دیده میشد.
توضیح پایههای INA
| شماره پایه | نام پایه | توضیح عملکرد | اتصال در مدار EMG |
| 3 | +IN (ورودی غیرمعکوس) | ورودی دیفرانسیلی مثبت؛ سیگنال EMG از فیلتر DC-Rejection وارد این پایه میشود. | از خروجی مرحله DC-Rejection با مقاومت سری به این پایه وارد میشود. |
| 2 | –IN (ورودی معکوس) | ورودی دیفرانسیلی منفی؛ اختلاف بین +IN و –IN توسط INA تقویت میشود. | از مسیر دیگر فیلتر DC-Rejection به این پایه وارد میشود. |
| RG (پایه 1 و 8) | مقاومت گین | با قرار دادن یک مقاومت بین پینهای 1 و 8، گین تقویتکننده تعیین میشود: ( G = 1 + \frac{50k}{R_G} ) | در مدار معمولاً از مقاومتهای ۲۵Ω یا ۵۰Ω موازی/سری برای ایجاد گین ۱۰۰۰–۲۰۰۰ استفاده میشود. |
| 5 | Ref (مرجع خروجی) | سطح مرجع ولتاژ خروجی را تعیین میکند؛ با تغییر این پایه، خروجی بالا/پایین شیفت میکند. | به خروجی انتگریتور (Servo / OP1) وصل میشود تا آفست DC حذف شود. در تست معمولی به GND وصل میشود. |
| 6 | Vout (خروجی) | خروجی تقویتشده INA114؛ سیگنال EMG بعد از تقویت اولیه اینجاست. | وارد فیلتر دو مرحلهای Band-Pass (MFB / Sallen-Key) میشود. |
| 9 | FB (فیدبک داخلی) | در نسخههای خاص برای حفاظت، Disconnect Drive یا کاربردهای کالیبراسیون فیدبک استفاده میشود. | اغلب به Ref یا مسیر فیدبک برای تثبیت سطح DC وصل میشود. |
| 7 | +Vcc | تغذیه مثبت | معمولاً +5V یا +12V بسته به طراحی مدار EMG |
| 4 | –Vee | تغذیه منفی | معمولاً –5V یا –12V برای ایجاد رنج کامل سیگنال |
| Case / Shield | شیلد | اتصال محافظ EMI | اغلب به GND آنالوگ یا شیلد کابل متصل میشود. |
چرا این بخش اینقدر مهم است؟
EMG بسیار ضعیف است (۱mV).
اگر این بخش:
- تقارن امپدانس رعایت نکند
- Rg غلط باشد
- Ref درست نباشد
کل مدار از کار میافتد یا اشباع میشود.
این دقیقاً امپلیفایر اصلی EMG است.
جمعبندی
بلوک تصویر:
Amplifier = INA114
گین ≈ ۲۰۰۰
تقویت دیفرانسیلی امواج EMG
حذف نویز مشترک (۵۰Hz)
ورودی از فیلتر DC-Removal
خروجی برای فیلترهای باندپس
حلقه پای راست درایوشده (Driven Right Leg – DRL)
ایدهٔ اصلی DRL
بدن بهطور طبیعی بهعنوان یک آنتن برای نویزهای فرکانس شبکه (۵۰/۶۰Hz) عمل میکند. این نویز بهصورت مود مشترک روی هر دو ورودی in-amp ظاهر میشود. حتی با CMRR بالا، اگر دامنهٔ این نویز چند ولت باشد، بخش کوچکی از آن پس از تقویت، هنوز میتواند مزاحم باشد.
DRL یک حلقهٔ بازخورد فعال است که:
- مود مشترک اندازهگیریشده در ورودیها را استخراج میکند؛
- آن را تقویت (ولی با فاز معکوس) و از طریق یک الکترود مرجع (معمولاً روی پا یا بخش استخوانی) به بدن تزریق میکند؛
- بدین ترتیب، ولتاژ مود مشترک روی بدن کاهش مییابد.
پیادهسازی حلقه DRL
میتوان از همان in-amp ورودی استفاده کرد:
- گره وسط مقاومتهای RG، تقریباً میانگین ولتاژ دو ورودی (یعنی مود مشترک) را در خود دارد.
- این گره به ورودی یک اپاَمپ DRL داده میشود؛
- اپاَمپ، سیگنال مود مشترک را با بهرهٔ منفی (مثلاً –۲۰ تا –۴۰) تقویت میکند؛
- خروجی اپاَمپ از طریق یک مقاومت نسبتاً بزرگ (مثلاً ۱۰۰k–۱MΩ) به الکترود مرجع متصل میشود.
در طراحی آموزشی باید سه نکته را تأکید کرد:
- پایداری حلقه: چون DRL یک حلقه بازخورد است، باید بهره حلقه، تأخیرها و قطبها طوری انتخاب شوند که سیستم نوسان نکند؛ معمولاً پهنایباند حلقه را محدود میکنند (مثلاً با یک خازن در مسیر بازخورد).
- ایمنی: مقاومتهای بزرگ در مسیر الکترود مرجع، جریان قابل تزریق را به چند میکروآمپر محدود میکنند تا برای بیمار بیخطر باشد.
- تطبیق با فیلترها: گاهی خروجی DRL را از نسخه فیلترشده مود مشترک استخراج میکنند (مثلاً بعد از حذف DC) تا از ناپایداری ناشی از مولفههای خیلیکمفرکانس جلوگیری شود.
OP2 به صورت فالوور
گرهی که بین R7 و R8 (شبکهی گِین INA114) است، در واقع یک جور «نمونه از ولتاژ مشترک / وضعیت ورودی INA» را به ما میدهد OP2 (LF351)این نقطه را به صورت فالوور (بافر، گین = ۱) میگیرد.
یعنی:
- پایه + به سر R7/R8
- خروجی به پایه – وصل است → Voltage Follower
خروجی OP2 (همان ولتاژ بافر شده) میرود به ورودی OP3 که همان تقویتکنندهی DRL است.
پس OP2 دقیقاً چهکار میکند؟
۱. نمونهگیری از ولتاژ مشترکِ اطراف INA114
این نقطه نشان میدهد بدنه/ورودیها نسبت به مرجع، چقدر بالا یا پایین رفتهاند.
- بافر کردن این ولتاژ برای DRL
- اگر OP3 مستقیماً به این گره وصل میشد،
ورودی DRL، شبکهی گِین (R7 و R8) را لود میکرد و گین INA114 بههم میخورد.
- با OP2:
- امپدانس ورودی خیلی زیاد و شبکهی R7/R8 اصلاً لود نمیشود.
- امپدانس خروجی کم و سیگنالِ کامنمود بهراحتی میرود داخل OP3.
- اگر OP3 مستقیماً به این گره وصل میشد،
- تغذیهکردن حلقه DRL با یک سیگنال تمیز و مجزا
- OP3 بعد از این بافر، روی این ولتاژ کار میکند (تقویت، معکوس، Low-pass) و نتیجه را به الکترود DRL میفرستد تا نویز ۵۰/۶۰Hz مشترک کم شود.
بخش اصلی DRL
ورودی حلقه DRL طرفِ قبلِ R11 هست و خروجی حلقه DRL طرفِ بعدِ R13 هست که به الکترود پا میرود. اینجا یک ولتاژ کامنمود آلوده به ۵۰Hz داریم
همون چیزی که DRL کمش میکنه.
این ولتاژ از طریق R11 (۱k) وارد بلوک DRL میشود:
- R11 جریان را محدود میکند
- برای پایداری و ایمنی است (بدن و کابل مستقیماً روی ورودی آپامپ ننشینند)
اوپامپ (OP3) با R12 و C4 نقش اصلی را بازی میکنندکه مثل یک تقویتکننده معکوسکننده با لوپس فیدبک فرکانسی می باشد:
- R12 (۱k): مقاومت فیدبک اصلی
- C4 (۱n): موازیِ R12 است → یعنی در فرکانس بالا امپدانسش کم میشود.
- نتیجه: این ترکیب عملاً یک Low-pass / فاز پایدار برای حلقه میسازد؛ یعنی:
- برای DC و ۵۰Hz، گین مشخص (مثبت یا منفی) میدهد.
- در فرکانسهای بالاتر، گین کم میشود تا حلقه داخل نوسان نرود.
خروجی OP3 همان سیگنال اصلاحی DRL است
یک نسخهی تقویتشده/معکوسشده از ولتاژ ورودی مشترک می باشد.
خروجی OP3 از طریق R13 (۱M) به الکترود پا میرسد چون R13 خیلی بزرگ است در نتیجه جریان تزریقشده به بدن نیز خیلی کم می باشد ولی همین مقدار کم کافی است که ولتاژ بدن چند ده میلیولت بالا/پایین شود.
پس:
حلقه DRL یک ولتاژ را از ورودی میگیرد، آن را در OP3 شکل میدهد،
و از طریق R13 به بدن میفرستد تا وضعیت کامنمود اصلاح شود.
به زبان ساده:
- یک مقدار ۵۰Hz روی ورودی (قبل R11) ظاهر میشود.
- این سیگنال وارد OP3 میشود (بعد از R11).
- OP3 با R12 و C4 آن را تقویت و با فاز مناسب تبدیل به سیگنال اصلاحی میکند.
- این اصلاح از طریق R13 روی بدن اعمال میشود.
- بدن و ورودی اصلی دوباره تحت تأثیر این سیگنال اصلاحی قرار میگیرند و کامنمود ۵۰Hz کوچکتر میشود.
- هرچه خطا (۵۰Hz) کمتر شود، سیگنال وارد DRL هم کمتر میشود، تا جایی که حلقه به نقطهای میرسد که دیگر نیازی به اصلاح بزرگ نیست (حالت تقریباً تعادل).
۱. گین این بخش DRL
ورودی از طرف بافر (OP2) از طریق R11 = 1k به پایه منفی اوپامپ میآید،
پایه مثبت به زمین است، و فیدبک از خروجی از طریق R12 = 1k (موازی با C4) برمیگردد به همان پایه منفی می رود.
پس در باند فرکانسی پایین که C4 عملاً مدار باز است:

یعنی:
- بهره حلقه DRL ≈ ۱– (۰ dB، با وارونگی فاز ۱۸۰ درجه)
خود این ولتاژ بعد از عبور از R13 = 1M روی بدن تزریق میشود،
پس بهره «موثرِ تزریق روی بدن» به خاطر R13 و امپدانس بدن از ۱ هم کوچکتر میشود،
ولی گین بلوک تقویتکنندهی DRL خودش تقریباً ۱– است.
۲. فرکانس قطع (به خاطر C4 = 1nF)
C4 به صورت موازی با R12 است و فقط برای جبران پایداری در فرکانسهای بالا استفاده شده است.
فرکانس قطبِ ناشی از آن تقریباً:

یعنی:
- تا چند ده کیلوهرتز (از جمله ۵۰/۶۰Hz و باند EMG)
گین ≈ -1 و C4 تقریباً بیاثر است. - از حدود ۱۶۰ kHz به بالا، گین شروع میکند به افتکردن (Low-pass برای پایداری حلقه می کند).
بخش Integrator
Integrator بخشی از حلقه فیدبک DC-Rejection است و وظیفهاش این است که بهصورت آهسته (low-frequency) ولتاژ خروجی را یکپارچهگیری کندو اگر هرگونه «آفست DC» بعد از تقویتکننده ایجاد شده باشد، آن را تشخیص دهد و یک ولتاژ تصحیحکننده تولید و این ولتاژ تصحیحکننده را به ورودی تقویتکننده برگرداند تا DC صفر شود .
در سیستم EMG، حتی اگر DC اولیه الکترود حذف شود،
باز هم ممکن است ورودی Op-amp کمی آفست داشته باشد و عدم تقارنهای حتی کوچک مسیر باعث DC drift شود . این آفستها خیلی آرام وارد سیگنال میشوند و چون تقویت زیاد است، باعث Saturation میشوند.
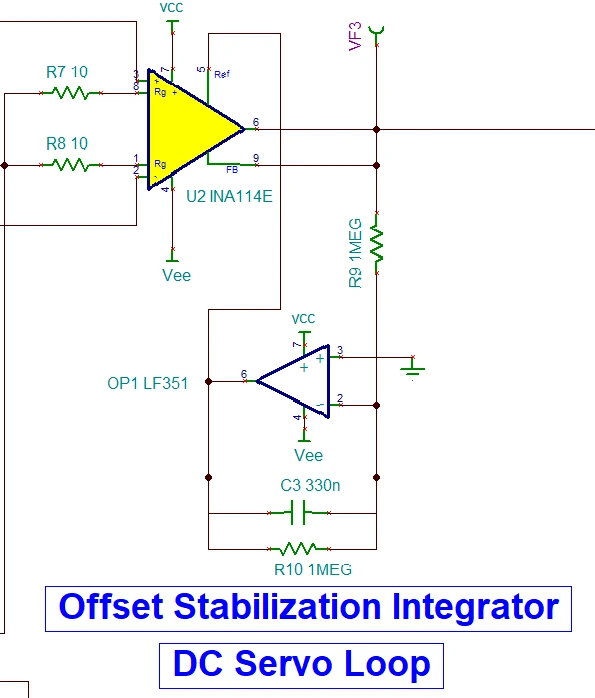
اینجاست که Integrator وارد عمل میشود:
هر خطای DC را پیدا میکند ، آن را به ورودی تقویتکننده برمیگرداند تا «خودش DC را لغو کنددر » نتیجه: خروجی همیشه ایدهآل و بدون DC باقی میماند.
Integrator بعد از Instrumentation Amplifier قرار دارد و بخشی از یک Active DC-Servo Loop است.
این Active Loop:
- DC را حذف میکند
- بدون اینکه CMRR خراب شود
- بدون اینکه باند EMG (10–1000Hz) آسیب ببیند . در واقع Integrator فقط فرکانسهای خیلی پایین (زیر 0.1Hz) را میگیرد.
این مدار یک فیلتر High-Pass خیلی آرام ایجاد میکند:
با R10=1MΩ و C3=330nF:
یعنی:
فقط زیر 0.5Hz حذف میشود و سیگنال EMG (20–500Hz) کاملاً دستنخورده عبور میکند.
DC Integrator ” را تشخیص میدهد چون DC ثابت است اگر ورودی یک Integrator مقدار ثابت (یعنی DC) باشد ، خروجی یک خط با شیب ثابت میشود.مثلاً اگر ولتاژ خروجی INA114 کمی مثبت باشد:

Integrator این را میبیند و ورودیاش همیشه +20mV است.
پس خروجی Integrator شروع میکند در جهت منفی افزایش یافتن:

یعنی:
هرچه آفست بیشتر باشد ، شیب سریعتر و هرچه آفست کمتر باشد ، شیب آهستهتر
,و گر آفست صفر شود Integrator متوقف میشود.
این رفتار باعث میشود Integrator یک «کنترلکننده DC» شود. خروجی Integrator به ورودی تقویتکننده برمیگردد.
بنابراین:
اگر خروجی INA114 مثبت شود Integrator سیگنال منفی به ورودی INA میفرستد و خروجی را به سمت صفر هل میدهد.اگر خروجی INA114 منفی شود Integrator سیگنال مثبت میدهد و خروجی را بالا میکشد تا زمانی که خروجی INA114 دقیقاً صفرِ DC شود.این رویه یک حلقه فیدبک میشود.
«Integrator از کجا میفهمد چهقدر باید سیگنال اصلاحی بدهد؟»
این قدرتِ فیدبک است یعنی هر چقدر خروجی از صفر بیشتر دور شود Integrator هم بیشتر و بیشتر اصلاح اعمال میکند. به محض اینکه خروجی به صفر برگشت و
ورودی Integratorبرابربا فقط AC بود انتگرالش صفر شده و هیچ اصلاح اضافی نمیدهد.
در نهایت Integrator مقدار لازم را حساب نمیکند فقط ولتاژ INA را نگاه میکند اگر مثبت بود ، آرام آرام پایینش میکشد و اگر منفی بود ، آرام آرام بالا میبرد تا وقتی که DC دقیقاً صفر شود. که همه اینها بهخاطر Feedback Loop است.
مدار فیلتر باند-پَس اکتیو
سیگنال EMG که قبلاً با INA114 تقویت شده، از VF1 وارد این بلوک میشود، بعد به ترتیب از استیج ۱ → استیج ۲ → استیج ۳ → استیج ۴ عبور میکند و در نهایت از VF2 بیرون میآید.
EMG باند مشخصی دارد (مدل تز: حدود ۱۰ Hz تا حدود ۱ kHz). پایینتر از این باند: حرکت الکترود، درِفت پوست، پلاریزاسیون و… که مزاحم هستند. بالاتر از این باند هم نویز مدار، RF، نویز دیجیتال، و اگر حذف نشوند در ADC alias میشوند.
برای همین یک Band-Pass تماماً سختافزاری طراحی و از ۴ سلول درجه دوم Butterworth با توپولوژی Sallen-Key استفاده شده است:
- ۲ سلول High-Pass (بالای شکل → استیج ۱ و ۲)
- ۲ سلول Low-Pass (پایین شکل → استیج ۳ و ۴)
هر بخش (HP و LP) مرتبه ۴ است یعنی شیب حدود –۴۰ dB/dec برای هر طرف.
سیگنال EMG: اول با INA114 تا حد ولت تقویت میشود ،بعد از طریق VF1 وارد این فیلتر ۴ سلولی میشود سپس سیگنال نهایی در VF2 آماده برای ADC است.
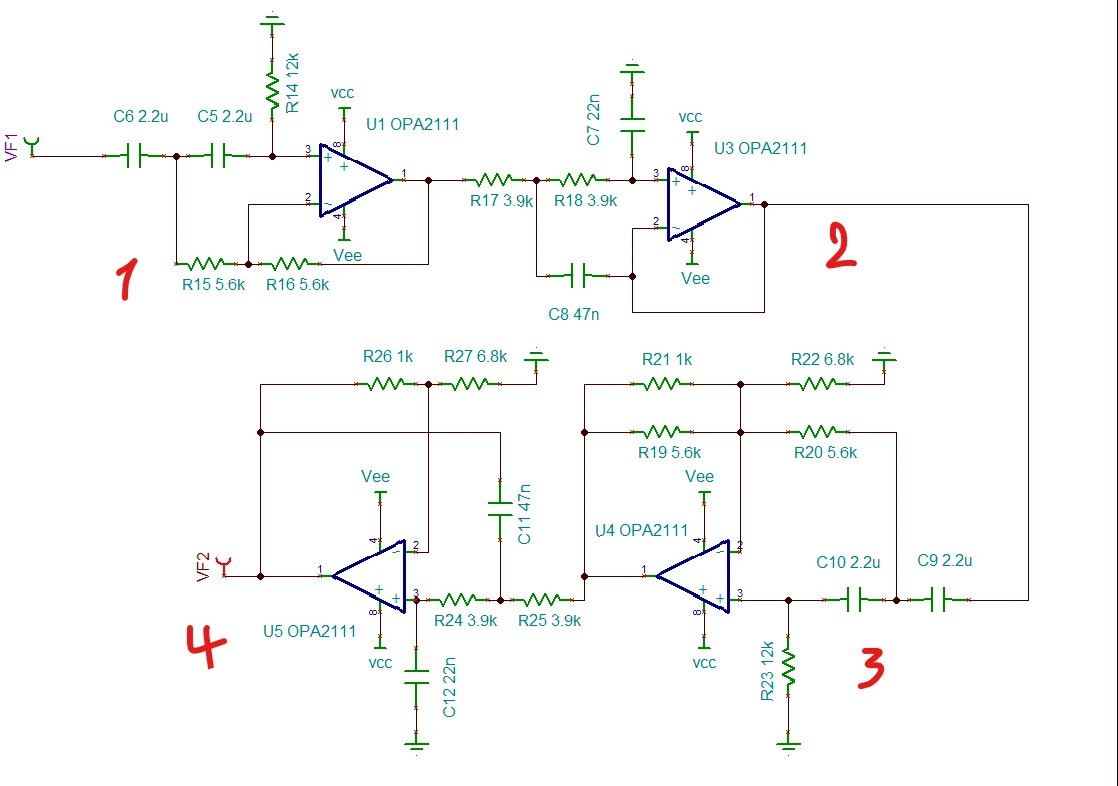
استیج ۱ – High-Pass درجه دوم + کوپل AC اولیه (بالای شکل، سمت چپ)
برای HP هم از Sallen-Key استفاده شده ولی یک مقاومت اضافه بین خروجی و ورودی معکوس اضافه شده ( است یعنی همین ساختار R15/R16).
پس این استیج در اصل یک فیلتر High-Pass درجه دوم Butterworth است، با مقدار کمی گین است.
این مدار عملاً یک فیلتر بالاگذر (High-Pass) با بهره نزدیک به 1 میسازد تا DC و فرکانسهای خیلی پایین را حذف کند، و در فرکانسهای بالاتر سیگنال را تقریباً بدون تقویت/تضعیف عبور دهد.
گین استیج ۱ روی باند عبور
در پایین مدار:
- R16 (5.6k) از خروجی به ورودی منفی (فیدبک)
- R15 (5.6k) از نود ورودی (بعد از C6) به ورودی منفی
این دقیقاً اسکلت یک تقویتکننده معکوسکننده است که بهرهاش:
اما چون ورودی مثبت هم «زمین AC خالص» نیست و با C5 و R14 شکل داده شده، رفتار کلی مدار از یک معکوسکنندهی ساده فراتر میرود و در نهایت در باند عبور، خروجی تقریباً همفاز و هماندازه ورودی میشود.
در فرکانسهای بالا، C5 و C6 تقریباً اتصال کوتاه میشوند. آنوقت:
- ورودی مثبت تقریباً همان سیگنال ورودی را میبیند.
- ورودی منفی هم از طریق R15 سیگنال را میگیرد و از طریق R16 فیدبک دارد.
وقتی و اپامپ مجبور است نگه دارد، نتیجهی عملی این میشود که مدار به جای اینکه “معکوسکننده با بهره -1 نسبت به زمینباشد،تبدیل میشود به چیزی شبیه بافر با بهره 1 نسبت به همان سیگنال مرجعشده روی ورودی مثبت.
بنابراین در باند عبور (فرکانسهای بالاتر از قطعها)، خروجی خیلی نزدیک به ورودی است.
فرکانس قطع
مسیر ورودی منفی (شاخه C6 + R15)
سیگنال از طریق C6 = 2.2µF وارد نود میشود و بعد از آن از طریق R15 به ورودی منفی “تزریق” میشود.این ترکیب یک بالاگذر مرتبه ۱ میدهد با فرکانس قطع تقریبی:

یعنی زیر ~13Hz این شاخه بهشدت تضعیف میشود.
مسیر ورودی مثبت (شاخه C5 + R14)
ورودی مثبت از طریق C5 = 2.2µF به سیگنال وصل شده، اما خودش با R14 = 12k به زمین مرجع شده است.این هم یک بالاگذر مرتبه ۱ میدهد با:

پس ورودی مثبت:
- در DC روی زمین/مرجع مینشیند (بهخاطر R14)
- در AC (فرکانس بالاتر) سیگنال را دریافت میکند (از طریق C5)
برای سالن-کی HP درجه ۲ با R1=R2=5.6k و C1=C2=2.2µF (تقریب ساده):

باند از حدود ۱۰Hz شروع میشود، پس این استیج دقیقاً روی همین رنج تنظیم شده است.
اثر این استیج روی سیگنال
وقتی سیگنال خروجی INA114 از VF1 وارد این استیج میشود DC و فرکانسهای خیلی کم مثلاً ۰ تا ۲–۳Hz تقریباً کاملاً بلاک میشوند.بازهی حدوداً ۵–۱۰Hz با شیب ملایم شروع به ظاهر شدن میکند.از حدود ۱۰–۱۵Hz به بالا، سیگنال تقریباً بدون افت (با گین ≈۲) عبور میکند.
شکل موج مبنا (baseline) که ممکن است چند صد mV یا حتی چند ولت آفست داشت، تقریباً صاف و نزدیک صفر میشود.حرکت کند الکترود و تغییرات پوست (حرکت دست، لرزشهای خیلی آهسته) زیاد دیده نمیشود و خود RMS سیگنال EMG کمی بزرگتر میشود (گین ۲).
استیج ۲ – فیلتر پایینگذر اکتیو (Active Low-Pass)بالای شکل، سمت راست)
این مدار یک فیلتر پایینگذر اکتیو (Active Low-Pass) با اپامپ در حالت بافر (Voltage Follower / Gain=1) است، ولی یک نکته مهم دارد: بهخاطر C8 که موازی R18 قرار گرفته، فیلتر «کاملاً استاندارد سَلِن-کی کلاسیک» نیست و علاوه بر 2 قطب، یک صفر (Zero) هم ایجاد میکند. نتیجهاش معمولاً این است که شیب نهایی در فرکانسهای خیلی بالا بهجای 40dB/dec حدود 20dB/dec میشود (چون صفر یکی از قطبها را تا حدی خنثی میکند).
خروجی اپامپ (پین 1) مستقیم به ورودی منفی (پین 2) وصل است ⇒ بافر واحد
یعنی در حالت ایدهآل:
+Vout≈V
ورودی مثبت (پین 3) سیگنال را از طریق شبکهی R17–R18–C7–C8 میگیرد.بنابراین کل فیلتر عملاً «شبکهی RC جلوی ورودی مثبت» + «بافر» است.
در DC (فرکانس صفر)
C7و C8 مدار باز هستند.پس مسیر فقط R17 و R18 است و چون ورودی اپامپ جریان نمیکشد، افتی روی Rها نداریم.درنتیجه:

پس گین DC تقریباً 1 است.
در فرکانسهای خیلی بالا
C7 (22n) تقریباً اتصال کوتاه به زمین میشود ⇒ ![]() به سمت GND کشیده میشود.اپامپ که بافر است، خروجی را هم به همان سمت میبرد ⇒ خروجی تضعیف میشود.C8 هم در فرکانس بالا R18 را بایپس میکند و شکل پاسخ را تغییر میدهد.پس این مدار یک پایینگذر است: پایینها عبور، بالاها قطع.
به سمت GND کشیده میشود.اپامپ که بافر است، خروجی را هم به همان سمت میبرد ⇒ خروجی تضعیف میشود.C8 هم در فرکانس بالا R18 را بایپس میکند و شکل پاسخ را تغییر میدهد.پس این مدار یک پایینگذر است: پایینها عبور، بالاها قطع.
نقش تکتک قطعات
- U3 OPA2111: بافر/ایزولهکننده؛ امپدانس ورودی بالا، بارگیری مرحله قبل کم، و خروجی با امپدانس پایین برای مرحله بعد.
- R17 و R18 (هر کدام 3.9k): با خازنها قطبهای فیلتر را میسازند و همچنین یک ایزولاسیون/مقاومت سری روی ورودی ایجاد میکنند.
- C7 (22n به زمین از نود ورودی اپامپ): عنصر اصلی پایینگذر؛ هرچه فرکانس بالاتر برود، بیشتر سیگنال را به زمین میکشد.
- C8 (47n بین نود میانی و خروجی): چون خروجی ≈ ورودی مثبت است، C8 عملاً بین نود میانی و نود ورودی مثبت قرار میگیرد و باعث ایجاد یک صفر و تغییر در Q/شیب پاسخ میشود (پاسخ نرمتر/کمریپلتر ولی شیب نهایی کمتر).
تابع انتقال
اگر نود بین R17 و R18 را ![]() و نود ورودی اپامپ/خروجی را V2=Voutبگیریم، تابع انتقال این ساختار میشود:
و نود ورودی اپامپ/خروجی را V2=Voutبگیریم، تابع انتقال این ساختار میشود:

نکات مهم از این فرمول:
- صورت کسر 1+sR18C8⇒ وجود Zero در:

- مخرج کسر درجه 2 ⇒ دو Pole (فیلتر مرتبه 2)
محاسبه عددی
Zero:

فرکانس طبیعی قطبها (تقریباً مرکز فیلتر):
با R17=R18=3.9k ، C7=22n ، C8=47n:

Q ( میزان تیز/رزونانسی بودن پاسخ)

Q≈0.35 یعنی فیلتر خیلی “نرم و overdamped” است (ریپل یا قله ندارد، گذار ملایم است).
شکل کلی پاسخ فرکانسی (تقریبی)
تا چندصد هرتز تقریباً گین 1. است. حوالی 0.8kHz (Zero) شکل فاز/شیب تغییر میکند.حوالی 1.2kHz (پولها) افت اصلی شروع میشود.در فرکانسهای خیلی بالا بهجای 40dB/dec، شیب نهایی معمولاً حدود 20dB/dec میشود چون صورت کسر یک 𝑠 دارد و یکی از قطبها را در حدی “خنثی” میکند.
استیج ۳ فیلتر بالاگذر اکتیو (Active High-Pass)
این دقیقاً این یک فیلتر بالاگذر اکتیو (Active High-Pass) همراه با تقویتکننده غیرمعکوسکننده است.
- هدف اصلی: حذف DC و فرکانسهای خیلی پایین (مثل drift، offset، حرکت آهسته)
- هدف دوم: در باند عبور، سیگنال را با یک گین ثابت حدود 1.12 عبور دهد.
بلوک تقویتکننده (گین اپامپ)
اپامپ U4 به شکل Non-Inverting بسته شده:
- ورودی + (پین 3) = نود سیگنال (سمت چپ C10)
- ورودی − (پین 2) = نود فیدبک مقاومتی (نود مشترک R19/R21/R22/R20)
گین DC / گین باند عبور
از خروجی تا ورودی منفی دو مقاومت R19 و R21 به یک نود مشترک وصلاند، یعنی موازی هستند:

و R22 از ورودی منفی به زمین است (مقاومت پاییندست):

پس مدار در فرکانسهای بالا (که خازنها تقریباً اتصالکوتاه میشوند) حدود 1.12 برابر تقویت میکند.
نکته: اینکه چرا دو تا مقاومت موازی گذاشته شده معمولاً برای «تریم/گزینههای تولید» یا رسیدن به مقدار دقیقتر/نویز کمتر/در دسترس بودن قطعه است.
مسیر ورودی و حذف DC (C9 و C10 و R23)
در سمت راست دو خازن C9 و C10 (هرکدام 2.2µF) به صورت سری در مسیر سیگنال هستند.
این یعنی برای سیگنال، یک کوپلینگ AC درست میکنی و DC را قطع میکنی.
معادل سری دو خازن برابر است با:

در سمت چپ C10 (همان ورودی + اپامپ) یک مقاومت R23=12k به زمین داریم که:
ورودی + را در DC بایاس میکند (نمیگذارد شناور شود)با Ceq فرکانس قطع بالاگذر را میسازد
اگر این مدار را «بهصورت ساده» یک بالاگذر درجه1 در نظر بگیریم، فرکانس قطع تقریبی:

یعنی حدود ۱۲ هرتز به بالا عبور میکند و DC و زیرِ آن را میخواباند.
این عدد کاملاً با مدارهای قبلیای که فرستاده بودی (حدود 6 تا 13Hz) همراستا است.
نقش «خاص» R20 (5.6k): چرا این مدار از یک AC-coupling ساده قویتر است؟
نود بین دو خازن (بین C10 و C9) را Nmid فرض کن.
R20 از Nmid به ورودی منفی اپامپ وصل است (نه به زمین).
این اتصال باعث میشود مدار فقط یک RC ساده نباشد؛ بلکه یک فیلتر اکتیو با مرتبه بالاتر / شکلدهی Q شود.
به زبان ساده:
- در فرکانسهای پایین: خازنها امپدانس بالا دارند و سیگنال به ورودی + نمیرسد و خروجی نزدیک صفر میماند (چون هم R23 و هم R22 مسیر DC به زمین میدهند).
- حوالی فرکانس قطع: جریانهای خازنی شروع میشوند و R20 بخشی از آن را به حلقه فیدبک میبردو شیب قطع و فاز بهتر کنترل میشود (معمولاً شبیه یک بالاگذر «نرم ولی مؤثرتر از 1st order»).
- در فرکانس بالا: خازنها تقریباً کوتاه و اثر R20 کمرنگتر میشود و مدار عمدتاً همان گین ثابت 1.125 را میدهد.
نتیجه: R20 کمک میکند پاسخ فرکانسی «تمیزتر» شود (کمتر به تغییرات بار/مرحله بعد حساس)، و گذارِ بالاگذر بهتر شکل بگیرد.
رفتار مدار در سه ناحیه فرکانسی (خیلی مهم)
DC و خیلی پایین (زیر چند هرتز)
- C9 و C10 تقریباً مدار باز
- ورودی + با R23 روی GND مینشیند
- ورودی − هم از طریق R22 به GND مرجع دارد
- خروجی برای حفظ V-≈+V نزدیک صفر ولت میرود
خروجی ≈ 0 → یعنی حذف offset و DC
حوالی قطع (حدود 10–20Hz)
- خازنها شروع به عبور دادن میکنند
- فاز تغییر میکند
- R20 در این ناحیه روی شکل منحنی و پایداری/شیب اثر محسوس دارد
اینجا همان جایی است که «کیفیت فیلتر» مشخص میشود.
فرکانسهای بالاتر از قطع
- C9 و C10 امپدانس کم
- ورودی + تقریباً ورودی را میبیند
- اپامپ به صورت غیرمعکوسکننده با گین:
Av≈1.125 خروجی ≈ 1.125 × ورودی
استیج ۴ – فیلترِ «پایینگذر اکتیو»
این مدار در اصل همان شبکهی فیلترِ «پایینگذر اکتیو»ی قبلی است، با این تفاوت مهم که اینجا اپامپ بافر نیست و یک گین غیرمعکوسکننده هم به آن اضافه شده. بنابراین از سمت راست، شبکهی R24–R25–C11–C12 یک فیلتر پایینگذر مرتبهدو (با یک صفر) میسازد و اپامپ U5 خروجیِ این فیلتر را با گین حدود 1.147 تقویت میکند.
بخش تقویتکننده اپامپ (گین)
U5 به صورت Non-Inverting Amplifier بسته شده:
- ورودی مثبت: همان خروجی فیلتر (نود بعد از R24)
- ورودی منفی: تقسیم مقاومتی از خروجی به زمین
بالا:
- R26 = 1k از خروجی به ورودی منفی
- R27 = 6.8k از ورودی منفی به زمین
پس گین حلقهبسته:

یعنی در باندی که فیلتر اجازه عبور میدهد، خروجی حدود 1.15 برابر ورودی فیلتر است.
شبکهی فیلتر R24-R25-C11-C12 دقیقاً چه میکند؟
این شبکه یک پایینگذر اکتیو میسازد که (به خاطر داشتن C11 و C12 روی دو نود مختلف) ذاتاً مرتبه 2 است.اما یک نکته مهم: چون اپامپ اینجا گین دارد و ورودی + “بار صفر” است، شبکه مثل یک فیلتر RC دو مرحلهای با بافر عمل میکند، با این تفاوت که به خاطر اینکه خروجی اپامپ «بهطور مستقیم به این شبکه برنمیگردد» (برخلاف مدار قبلی که C8 به خروجی وصل بود)، اینجا صفرِ واضح مثل قبل نداریم.اینجا بیشتر شبیه یک دوقطبی نرم (دو قطب واقعی) است.
فرکانسهای قطع هر مرحله (تقریب مفید مهندسی)
مرحله اول: (نود C11)

مرحله دوم: (نود C12)

یعنی از حدود ~800Hz به بعد افت شروع میشود، و بالاتر از ~2kHz افت شدیدتر میشود.
چون این دو مرحله پشتسرهماند، پاسخ کلی شبیه یک پایینگذر مرتبهدو میشود (نزدیک شیب 40dB/dec در فرکانسهای بالا، البته نه ایدهآل مثل باتروورث مگر اینکه دقیق طراحی شده باشد).
رفتار مدار در DC، فرکانس میانی، فرکانس بالا
DC و فرکانسهای خیلی پایین
- C11 و C12 مدار باز و هیچ جریان به زمین نمیرود
- پس تقریباً:

یعنی در پایینفرکانسها، مدار یک تقویتکننده غیرمعکوسکننده با گین 1.147 است.
حوالی 0.8kHz تا 2kHz
- C11 شروع میکند به کشیدن سیگنال به زمین و افت اول
- C12 هم شروع میکند و افت دوم
- فاز سیگنال هم عقب میافتد (تا نزدیک -180 درجه در خیلی بالا)
اینجا همان ناحیهی “roll-off” اصلی است.
خیلی بالاتر از چند کیلوهرتز
- C11 و C12 تقریباً اتصال کوتاه به زمین و ورودی + عملاً به زمین نزدیک میشود.
- پس خروجی هم به سمت صفر میرود.
یعنی افت شدید در بالافرکانسها.
نقش هر قطعه
- R25 + C11: قطب اول / کاهش نویز فرکانسهای بالاتر (اولین زانوی فیلتر)
- R24 + C12: قطب دوم / تیزتر کردن افت
- U5: ایزولاسیون و تقویت
- R26/R27: تعیین گین نهایی (≈1.147)
جمعبندی نهایی
این مدار یک تقویتکننده غیرمعکوسکننده با گین ≈ 1.15 است که قبل از اپامپ یک فیلتر پایینگذر دو مرحلهای قرار داده شده:
- شروع افت حدود ~870 Hz
- قطب دوم حدود ~1.85 kHz
- هدف: کاهش نویز/محدود کردن باند، و سپس تقویت ملایم خروجی.
گین استیج ۴
تقریباً:
اونوقت:
یعنی:
گین استیج ۴ حدود ۱٫۱۵ برابر است
با این تصحیح، گین تقریبی ۴ استیج میشود:
HP1) A1≈2 )
HP2) A2≈1 )
![]() حدود ۱–۲ (بسته به نسبت دقیق مقاومتها، قبلاً حدود ۲ فرض کردیم)
حدود ۱–۲ (بسته به نسبت دقیق مقاومتها، قبلاً حدود ۲ فرض کردیم)

پس گین کلی فیلتر چیزی تو محدودهی:

که اگر A3≈2 بگیریم:

یعنی فیلتر بیشتر شکلدهندهی باند است تا یک تقویتکنندهی خیلی بزرگ؛
تقویت اصلی همچنان توسط INA114 قبل از VF1 انجام میشود.
فرکانس قطع
با R≈۳٫۹k و C=۲۲nF:

با تنظیم دقیق و ترکیب با استیج ۳، پاسخ نهایی LP چهارم مرتبه حول ۱kHz تنظیم شده.
(یکی از سلولها کمی پایینتر، دیگری کمی بالاتر قرار داده شده تا Butterworth چهارم مرتبه بهدست بیاید.)
. اثر این استیج روی سیگنال
بعد از استیج ۴ (خروجی VF2):
EMG در بازهی تقریباً ۱۰Hz تا ~۱kHz با شکل طیفی مناسب وجود دارد.زیر ۱۰Hz و بالای ۱kHz با شیب –۴۰dB/decade بهشدت تضعیف شدهاند.خروجی امپدانس پایینی دارد و آمادهی رفتن به ورودی ADC است، بدون اینکه ADC با نویز بالا یا آفست بزرگ درگیر باشد.
مدار ایزولاسیون (Isolation)
در طراحی هر دستگاه پزشکی، ایمنی بیمار مهمترین اصل محسوب میشود. زمانی که بدن انسان به تجهیزات الکتریکی متصل میشود، حتی جریانهای بسیار کوچک میتوانند خطرناک باشند. بهطور مشخص، عبور جریانی در حد 10 میکروآمپر با فرکانس 50 یا 60 هرتز از ناحیه قلب میتواند منجر به آسیب دائمی یا حتی مرگ شود. به همین دلیل، استانداردهای ایمنی پزشکی مانند IEC 601 / IEC 60601 الزامات سختگیرانهای را برای جداسازی الکتریکی بین بیمار و بخشهای متصل به برق شهر تعریف کردهاند.
در یک سیستم ثبت EMG، الکترودها مستقیماً روی بدن قرار میگیرند و سیگنالهای زیستی با دامنه بسیار کوچک (در حد چند میلیولت) را دریافت میکنند. این سیگنالها پس از تقویت و فیلتر شدن، باید به مراحل دیجیتال (ADC، میکروکنترلر، کامپیوتر) منتقل شوند. از آنجا که این بخشها معمولاً به زمین برق شهر یا تجهیزات خارجی متصل هستند، بدون ایزولاسیون، یک مسیر بالقوه خطرناک برای عبور جریان از بدن بیمار ایجاد میشود.
بنابراین، حتی اگر هدف طراحی، ساخت یک پروتوتایپ آزمایشگاهی باشد (نه یک دستگاه پزشکی تجاری)، در صورت استفاده از تغذیه AC یا اتصال به کامپیوتر، ایزولاسیون الکتریکی الزامی است.
ایزولاسیون گالوانیکی
ایزولاسیون گالوانیکی به این معناست که هیچ مسیر هدایتی مستقیم (جریان DC یا AC) بین دو بخش مدار وجود نداشته باشد. در چنین حالتی جریان الکتریکی نمیتواند از یک سمت به سمت دیگر عبور کند؛تنها اطلاعات (سیگنال) از طریق روشهای غیررسانا مانند نور، میدان مغناطیسی یا کوپلینگ خازنی منتقل میشود و حلقههای زمین (Ground Loops) حذف میشوند؛ایمنی بیمار و ایمنی سیستم بهطور همزمان افزایش مییابد.
در سامانه EMG، ایزولاسیون معمولاً بین بخش شناور متصل به بیمار (Patient-side) و بخش غیرایزوله متصل به برق شهر و تجهیزات خارجی (System-side)ایجاد میشود.
روشهای رایج ایزولاسیون سیگنال
برای ایزولهکردن سیگنالهای آنالوگ تقویتشده EMG، دو روش اصلی وجود دارد:
ایزولاسیون نوری (Optocoupler)
در این روش، سیگنال ابتدا به شکل دیجیتال یا پالسی تبدیل میشود و سپس از طریق نور (LED و فوتودیود) منتقل میگردد. مزیت اصلی این روش، تحمل ولتاژ ایزولاسیون بالا (تا چند کیلوولت) است، اما معایب آن شامل محدودیت دقت برای سیگنالهای آنالوگ پیوسته،نیاز به مدولاسیون/دمودولاسیون خارجی و پیچیدگی طراحی آنالوگ دقیق است.
تقویتکنندههای ایزوله (Isolation Amplifiers)
تقویتکنندههای ایزوله، راهکاری حرفهایتر برای انتقال سیگنالهای آنالوگ با دقت بالا هستند. این آیسیها سیگنال آنالوگ را بهصورت داخلی مدوله میکنند،آن را از یک مانع ایزولاسیون داخلی عبور میدهند و در سمت دیگر، مجدداً به سیگنال آنالوگ تبدیل میکنند.
یکی از پرکاربردترین این آیسیها در سیستمهای اندازهگیری و پزشکی، ISO124 از شرکت Texas Instruments است.
معرفی آیسی ISO124 و دلیل انتخاب آن
ISO124 یک تقویتکننده ایزوله آنالوگ با بهره واحد (Unity Gain) است که دارای ویژگیهای زیر میباشد:
- ولتاژ ایزولاسیون پیوسته: 1500 Vrms
- ایزولاسیون تستشده تا: 2400 Vrms
- نسبت حذف مود ایزولاسیون (IMR): حدود 140 dB در 60 Hz
- غیرخطی بودن ماکزیمم: 0.01%
- پهنای باند سیگنال: حدود 50 kHz
- ورودی و خروجی آنالوگ ±10 V
- تغذیه دوگانه مستقل برای دو سمت ایزوله (±VS1 و ±VS2)
این مشخصات باعث میشوند ISO124 بتواند سیگنالهای کمدامنه و حساس EMG را بدون افت کیفیت، نویز محسوس یا اعوجاج، از مانع ایزولاسیون عبور دهد.
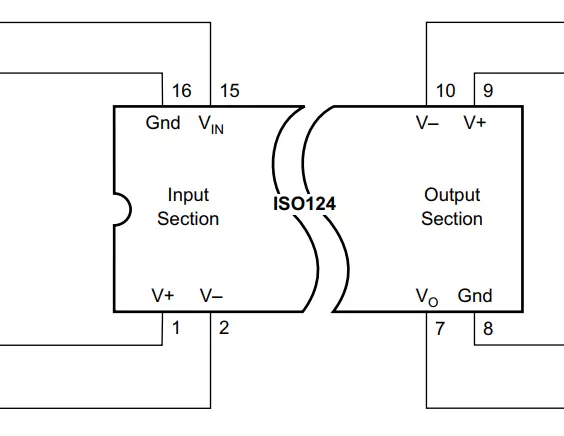
ساختار داخلی ISO124
بر اساس دیتاشیت، ISO124 از یک ساختار مدولاسیون–دمودولاسیون دیجیتال با کوپلینگ خازنی استفاده میکند:
در سمت ورودی (Patient-side)، سیگنال VIN ابتدا به جریان تبدیل میشود.
این جریان وارد یک مدولاتور Duty-Cycle با فرکانس حامل حدود 500 kHz میشود.سیگنال مدولهشده از طریق دو خازن ایزولاسیون داخلی (حدود 1 pF) از مانع ایزولاسیون عبور میکند.در سمت خروجی (System-side)، سیگنال دمودوله شده و دوباره به ولتاژ آنالوگ تبدیل میشود.فیلترهای داخلی و Sample-and-Hold، ریپل ناشی از مدولاسیون را حذف میکنند.به دلیل دیجیتال بودن انتقال در مانع ایزولاسیون، ویژگیهای فیزیکی مانع (ظرفیت، تغییرات دما، ولتاژ) تأثیر محسوسی بر دقت سیگنال ندارند.
در یک سامانه استاندارد EMG، ISO124 بعد از مراحل آنالوگ front-end قرار میگیرد. در این ساختار تمام مدارهای قبل از ISO124 در سمت شناور بیمار قرار دارند؛خروجی ISO124 به سمت غیرایزوله سیستم متصل میشود.
اتصال پایههای اصلی ISO124
- VIN: ورودی سیگنال آنالوگ تقویتشده EMG
- VOUT: خروجی ایزولهشده (همان سیگنال، با بهره 1)
- GND1: زمین سمت بیمار
- GND2: زمین سمت سیستم
- ±VS1: تغذیه ایزوله سمت بیمار
- ±VS2: تغذیه سمت سیستم
نکته بسیار مهم آموزشی:
GND1 و GND2 نباید به هیچ عنوان به هم متصل شوند؛ اتصال این دو زمین، کل مفهوم ایزولاسیون را از بین میبرد.
برای عملکرد صحیح ISO124:
- هر سمت باید منبع تغذیه مستقل داشته باشد.
- معمولاً از یک مبدل DC-DC ایزوله پزشکی برای تغذیه ±VS1 استفاده میشود.
- در هر پایه تغذیه، خازن بایپس 1µF نزدیک آیسی الزامی است.
مزایای ISO124 در سامانه EMG
استفاده از ISO124 در طراحی EMG باعث میشود:
- ایمنی بیمار تضمین شود (عدم عبور جریان خطرناک)
- حلقههای زمین حذف شوند.
- نویز مود مشترک و نویز ناشی از سیستم دیجیتال کاهش یابد.
- سیگنال EMG با دقت بالا و بدون اعوجاج منتقل شود.
- طراحی نسبت به اپتوکوپلرها سادهتر و دقیقتر باشد.
در مجموع آیسی ISO124 بهعنوان یک تقویتکننده ایزوله آنالوگ دقیق، امکان انتقال امن و باکیفیت سیگنال EMG را از بدن بیمار به بخش پردازش دیجیتال فراهم میکند. با استفاده صحیح از این آیسی، سیستم به دو ناحیه مستقل تقسیم میشود: ناحیه شناور متصل به بیمار و ناحیه متصل به برق شهر، که این تفکیک اساس طراحی ایمن تجهیزات پزشکی است.