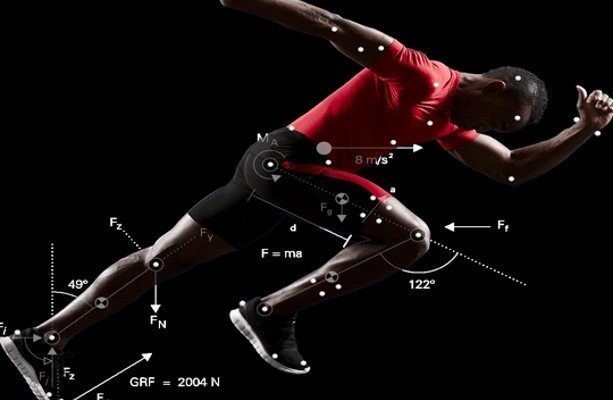
Motion tracking sensors
Motion tracking assists in tracking the movement of objects and transferring the sensed data to an application for further processing. Motion tracking includes capturing the motions of objects matching with its stored motion template. This has a wide range of applications such as in military, entertainment, sports, medical applications, validation of computer vision and robotics. Furthermore, it is also used in film making and in video game development. In many areas, motion tracking is often called motion capture, whereas in film making and games, motion tracking is commonly called match moving.
MEMS Gyroscopes
The Gyroscope measures angular velocity using the Coriolis Effect. When a mass moves in a certain direction with a certain speed and an external angular rate is applied as shown in the green arrow below, a force such as the red-blue arrow shown, causes the mass to move vertically.
So, similar to the accelerometer, this displacement causes a change in capacitance that is associated with a specific angular rate.
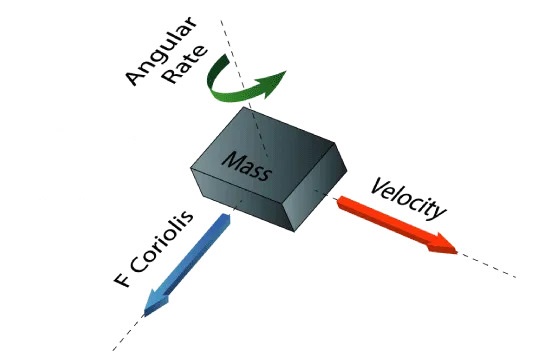
The structure of the micro-Gyroscope is something like this. A mass that is constantly moving or oscillating and when an external angular rate is applied, the flexible part of the mass moves and undergoes vertical displacement.
Accelerometers
An accelerometer is a device that measures the vibration, or acceleration of motion of a structure. The force caused by vibration or a change in motion (acceleration) causes the mass to “squeeze” the piezoelectric material which produces an electrical charge that is proportional to the force exerted upon it. Since the charge is proportional to the force, and the mass is a constant, then the charge is also proportional to the acceleration. These sensors are used in a variety of ways from space stations to handheld devices, and there’s a good chance you already own a device with an accelerometer in it. For example, almost all smartphones today house an accelerometer. They help the phone know whether it undergoes acceleration in any direction, and it’s the reason why your phone’s display switches on when you flip it. In an industry setting, accelerometers help engineers understand a machine’s stability and enable them to monitor for any unwanted forces/vibrations.
An accelerometer works using an electromechanical sensor that is designed to measure either static or dynamic acceleration. Static acceleration is the constant force acting on a body, like gravity or friction. These forces are predictable and uniform to a large extend. For example, the acceleration due to gravity is constant at 9.8m/s, and the gravitation force is almost the same at every point on earth.
The theory behind accelerometers is that they can detect acceleration and convert it into measurable quantities like electrical signals.